When problem-solving gets physical: What a virtual lockbox reveals about human learning
What happens to our learning when solving a problem literally becomes harder work?
The answer, it turns out, is: we pay more attention and learn faster, at least when the extra difficulty comes from physical effort or waiting time, not from making the puzzle itself more complex.
A new paper by SCIoI members Oussama Zenkri, Florian Bolenz, Thorsten Pachur, and Oliver Brock, titled “Human Exploration in Complex Problem-Solving Tasks: More Effortful Interaction Leads to Higher Efficiency” and published in the special issue “From Animals to Animats: The Tradition Continues” of the journal Adaptive Behavior, tackles this question with a new experimental setup: a virtual “lockbox” puzzle that people can solve using either a simple computer mouse, a mouse with built-in delay, or a physically demanding haptic device.
The study first attracted attention as one of the top papers at the From Animals to Animats (SAB) conference 2024 and now appears, in extended form, in the Adaptive Behavior special issue.
A new kind of puzzle for studying exploration
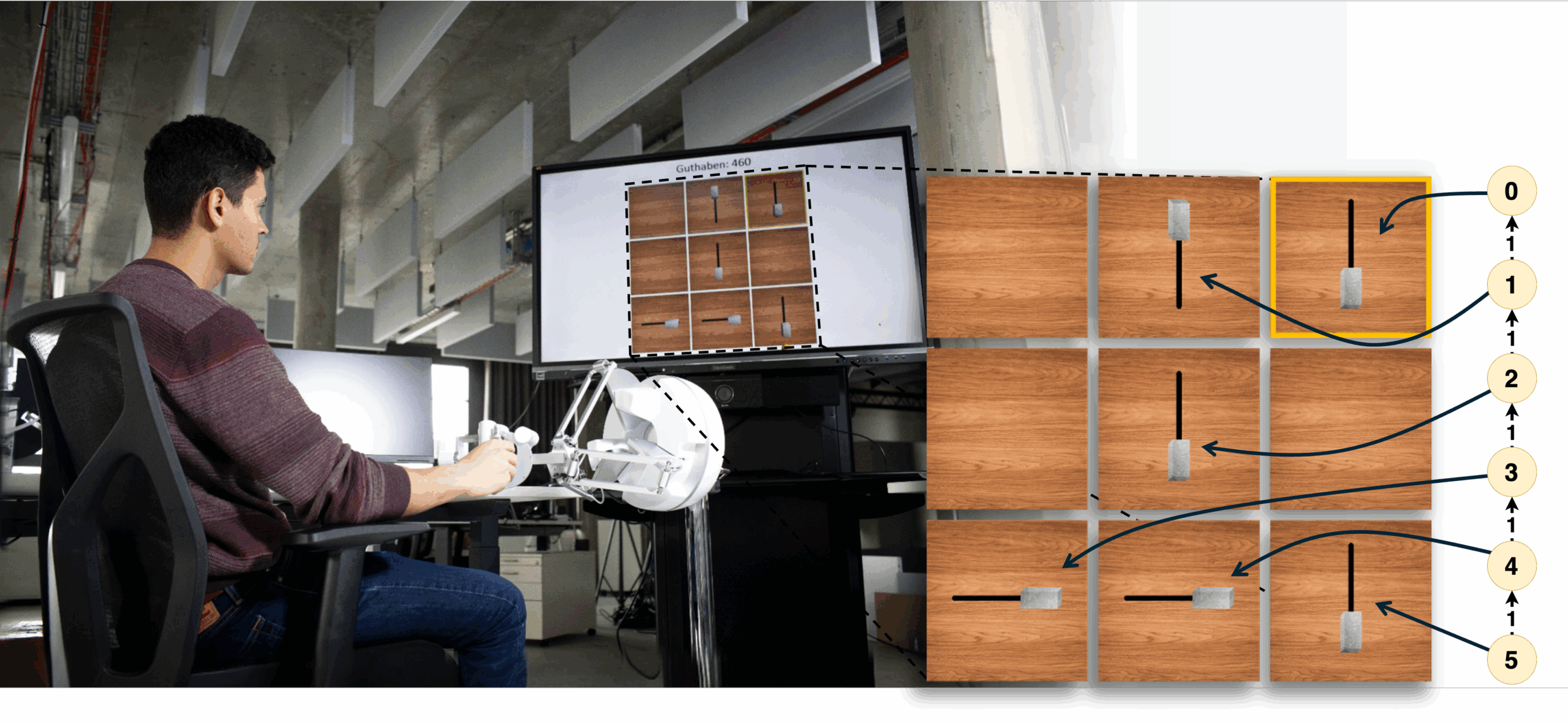
The Lockbox paradigm was developed at SCIoI and TU Berlin’s Robotics and Biology Laboratory, led by SCIoI spokesperson Oliver Brock, as part of a broader effort to study problem solving in environments that resemble real life more closely than typical lab tasks. First author Oussama Zenkri created a virtual puzzle in which people have to solve the lockbox by working out hidden rules from partially observable information. In other words, participants don’t see these underlying rules, understanding grows only through trial and error.
The lockbox consists of several sliders arranged on a small grid. Their underlying dependency structure, which slider locks which one is always the same. However, their visual layout changes every round, forcing participants to extract the hidden logic rather than remember a sequence of moves, a hallmark of generalizable problem-solving.
To test how different types of effort shape exploration, the researchers had participants solve the lockbox under three conditions:
- a standard mouse (fast and effortless),
- a mouse with a built-in 2.5-second delay after each move (slow but physically easy),
- and a haptic device that requires real pushing and pulling motions (physically demanding).
Crucially, the delay was calibrated to take roughly the same amount of time per action as the haptic device, allowing the team to distinguish the effect of time cost from the effect of physical effort.
Higher effort, smarter exploration
The interaction conditions produced markedly different exploration behaviours. With the effortless mouse, participants clicked freely and often revisited states they had already tried unsuccessfully, which made the exploration inefficient.
Once effort was introduced — either through waiting or physical work — behaviour changed. Participants became more selective, avoided repeating mistakes, and converged more quickly on efficient strategies. Their exploration grew more structured and focused.
The haptic condition had the strongest effect. Even though it took the same amount of time as the delayed mouse, the physical engagement prompted people to think ahead more and act less impulsively. In other words: when actions cost more, attention sharpens.
Why this matters for understanding intelligence
The findings support a core principle of SCIoI research: intelligence is embodied. The way we act in the world, how much something costs us in effort, time, or energy, fundamentally shapes how we learn from it. The Lockbox paradigm makes this relationship measurable.
For robotics, this insight is especially valuable. Robots, too, face environments where actions carry costs and mistakes are expensive. Understanding how humans adapt their exploration strategies under different types of effort can inspire new approaches to robotic learning and autonomous decision-making.
For Oussama and the authors, the lockbox provides a simple yet effective lens on how people learn structure under uncertainty. Making actions slightly more effortful turns out to shift exploration in measurable ways, offering new insight into the mechanics of intelligent behaviour.



