Can robots understand the real world? SCIoI researchers featured in Germany’s ZEIT WISSEN podcast on the future of humanoid AI
A robot folds laundry in a viral video. Another one walks across a stage at the White House. Online, it suddenly feels as if humanoid robots are everywhere. But what can these machines actually understand about the world around them? And how far are we really from robots that can help us in everyday life?
In the new ZEIT WISSEN podcast episode “Hey Robot, Make the Beds and Clean the Apartment!” („Hey Roboter, mach die Betten und räum die Wohnung auf!“), researchers from Science of Intelligence (SCIoI) offer a look into the reality behind today’s AI and robotics boom and into the difficult path toward machines that can truly navigate the real world. For the episode, journalist Max Rauner visited the labs of SCIoI, speaking with researchers across robotics, AI, psychology and philosophy about one of the biggest technological promises of our time: intelligent humanoid robots for everyday life.
Listen to the German-language podcast here:
ZEIT WISSEN Podcast Episode „Hey Roboter, mach die Betten und räum die Wohnung auf!“
ZEIT WISSEN is one of Germany’s most prominent science media platforms and part of the weekly newspaper DIE ZEIT. Its podcast “How Do You Know That?” is highly regarded for its long-form reporting and immersive storytelling. It reaches a large audience far beyond academia, bringing complex scientific questions into public conversation widely regarded as one of the leading German-language science podcasts and regularly features cutting-edge research topics from across the sciences.
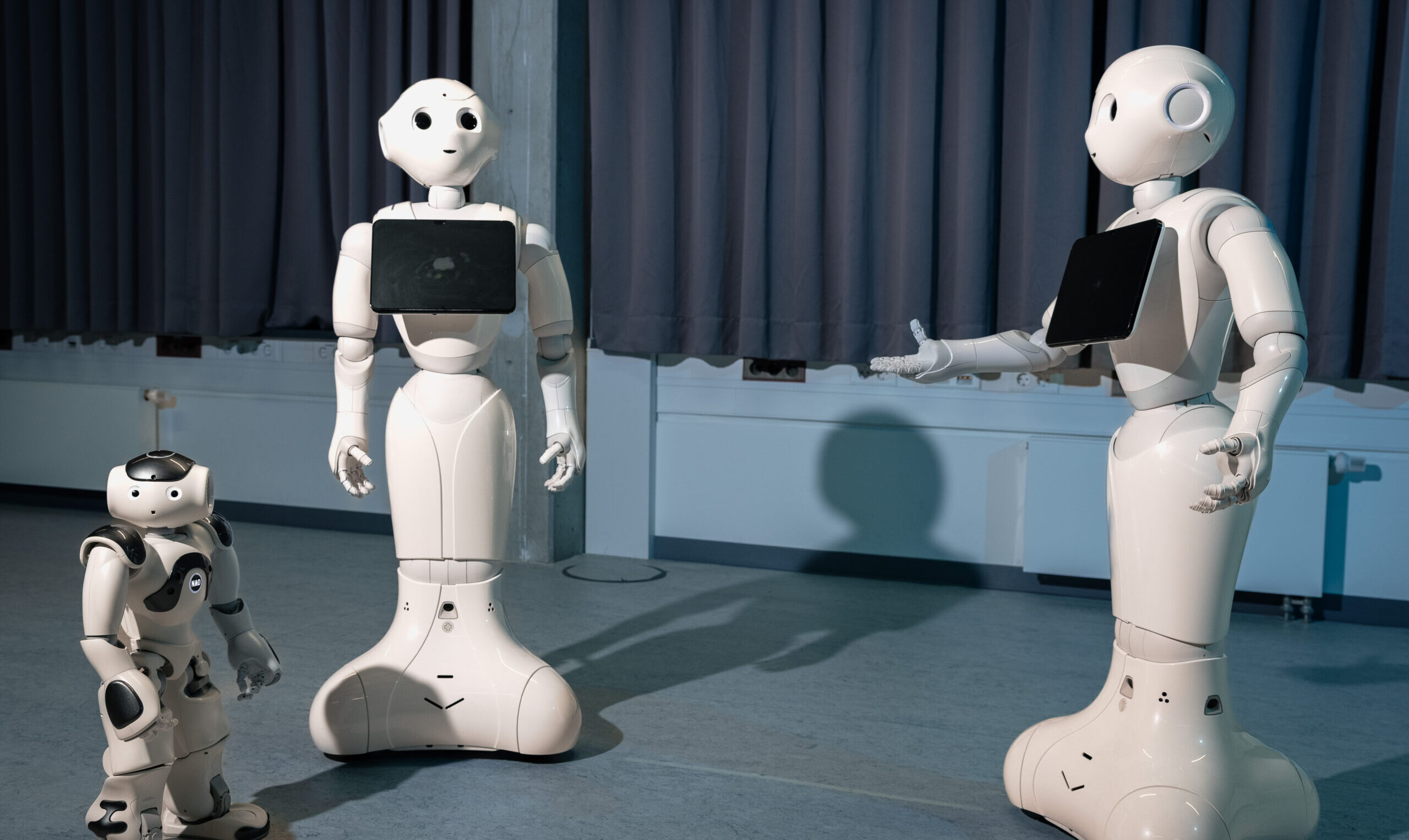
From vacuum robots to humanoid helpers
The episode opens with a familiar situation: the quiet helper already living in many homes, the vacuum robot. But from there, the discussion quickly moves toward a bigger question currently driving global robotics research. Could large language models eventually become the brains of humanoid household robots? Are we approaching a “ChatGPT moment” for robotics?
Inside SCIoI’s labs, the answer becomes far more complicated and much more interesting.
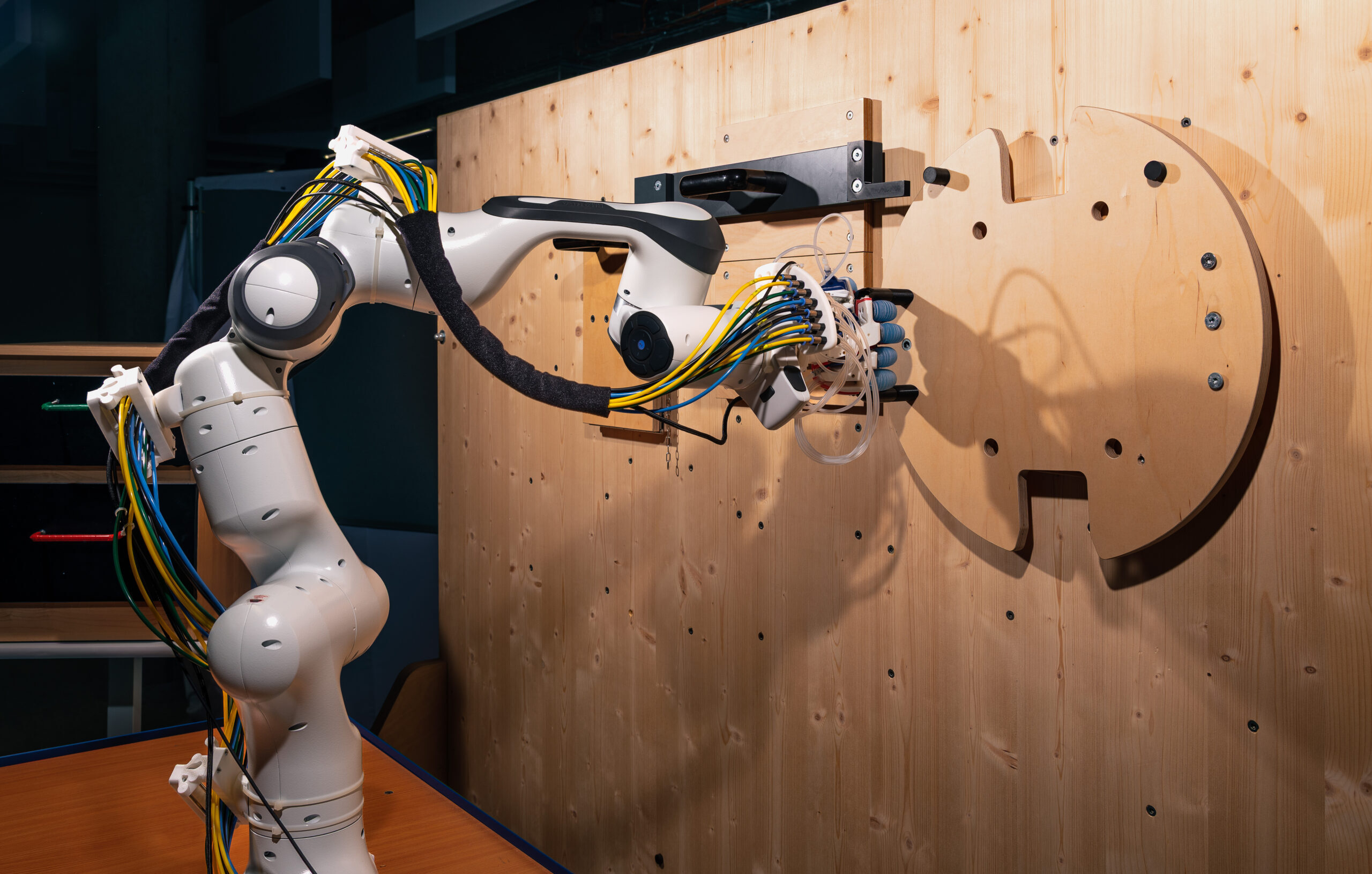
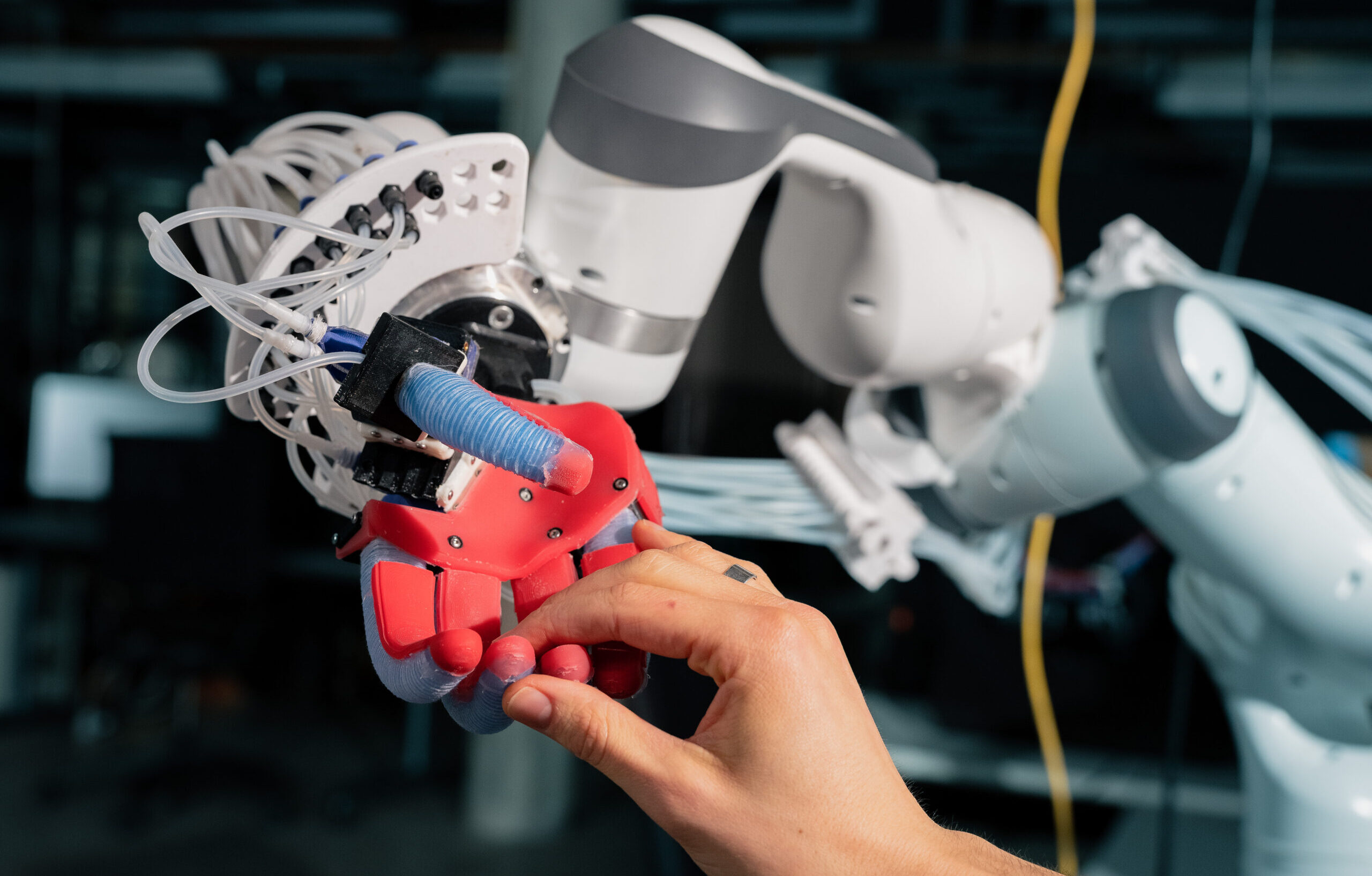
The journalists meet Oliver Brock, Oussama Zenkri, Alexander Koenig and Vito Mengers, who guide them through robotic test scenarios involving lockboxes, mechanical puzzles and practical challenges. Some of the robots use chatbot systems to help interpret tasks and generate possible actions. But the experiments reveal a gap between fluent language and real-world understanding.
Why robots still get stuck
In one demonstration, Oussama Zenkri shows how he uses large language models in embodied problem-solving tasks involving lockboxes. He tested how the systems behave when given different kinds of information about the world, from raw camera images to ground-truth symbolic descriptions that should, in theory, be easier for AI models to reason with. With visual information, the models often misunderstood the outcomes of their own actions, sometimes repeatedly claiming success while failing the task. Surprisingly, they performed better with messy visual input than with ground-truth information. The experiments revealed how fragile current AI systems’ perception and reasoning remain when faced with real-world problems. Oussama also observed that these models showed little ability to learn from experience, unlike human participants solving the same lockboxes, who continuously improved through repeated interaction. This highlights the gap between fluent language generation and genuine problem-solving skills.