Team of researchers led by SCIoI’s Guillermo Gallego receive IEEE Honorable Mention for work on robot vision stabilization
SCIoI PI Guillermo Gallego has received a major recognition for his work on how robots see and interpret the world. His recent research paper, “On the Benefits of Visual Stabilization for Frame- and Event-Based Perception,” has been selected as one of only five Honorable Mentions from over 1,500 publications in the IEEE journal Robotics and Automation Letters (RA-L) for the year 2024.
This distinction, awarded by the journal’s Editorial Board and Editor-in-Chief, highlights the paper’s outstanding contribution to the field of robotic perception, and celebrates its impact on how machines handle visual information in uncertain environments.
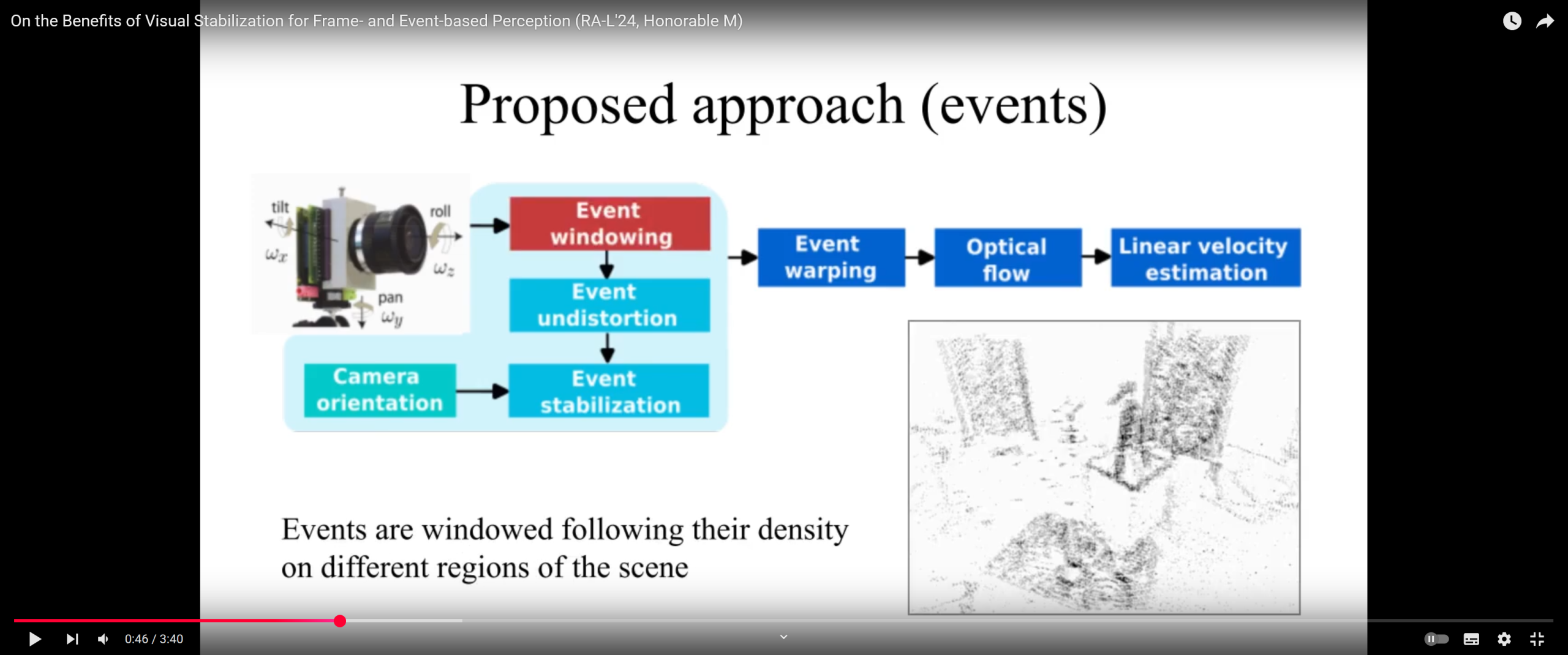
Co-authored with Juan Pablo Rodríguez-Gómez, José Ramiro Martínez-de Dios, and Anibal Ollero, from University of Seville (Spain), the paper investigates how stabilizing a robot’s visual input, whether from traditional video or cutting-edge event-based sensors, can significantly improve performance in tasks like navigation and tracking.
“The core idea is simple but powerful,” Guillermo explains. “In nature, birds stabilize their gaze direction to better handle body perturbations caused by wind (click video below); likewise, if a robot stabilizes its eyes, it can understand and act more accurately and efficiently.”