SCIoI member Vito Mengers receives Best Paper Award at IEEE International Conference on Robotics and Automation (ICRA) 2025
Science of Intelligence (SCIoI) member Vito Mengers together with SCIoI spokesperson Oliver Brock as advisor and co-author received the Best Paper Award in the category Planning and Control at the IEEE International Conference on Robotics and Automation (ICRA 2025). The Conference is widely regarded as one of the most prestigious and influential conferences in the field of robotics. Organized annually by the IEEE Robotics and Automation Society (RAS), ICRA serves as a premier platform for researchers, industry professionals, and academics to present and discuss the latest advancements in robotics and automation.
In the world of robotics, the ability to carry out multi-step tasks, like stacking blocks or opening drawers, has traditionally depended on meticulous planning. A robot would map out a path, chart every subgoal, and follow a carefully predicted sequence of moves. But what if planning is the problem?
Imagine you’re trying to open a drawer. If you can’t see the handle, you might shift your position. If it slips from your grasp, you adjust and try again. You’re not following a rigid, pre-written plan—you’re feeling your way forward, moment to moment, using whatever information your senses and environment give you. What if robots could do the same?
This is the core idea behind the acclaimed paper “No Plan but Everything under Control: Robustly Solving Sequential Tasks with Dynamically Composed Gradient Descent.” Instead of painstakingly planning every step of a task, what if a robot could simply adapt its actions based on how the world responds—using feedback and regularities already embedded in the environment?
Everything under control without a plan?
Traditional robotics has long relied on carefully planning out the steps needed to reach a goal, predicting future states, and calculating optimal action sequences. But this approach has a well known Achilles’ heel: uncertainty. In messy, unpredictable real-world settings, plans can fall apart quickly.
In this paper, the researchers flip that paradigm. They use a method they call “dynamically composed gradient descent,” which is a radically different way to think about intelligent behavior. Gradient descent is like a “hot and cold” game. You don’t know where the object is, but each move gives you feedback. “Hotter?” Great, keep going that way. “Colder?” Turn around. While typically seen as too shortsighted for long or complex tasks, the method proves how gradient-based control can actually solve multi-step problems if it’s allowed to dynamically rewire itself in response to the task’s unfolding structure.
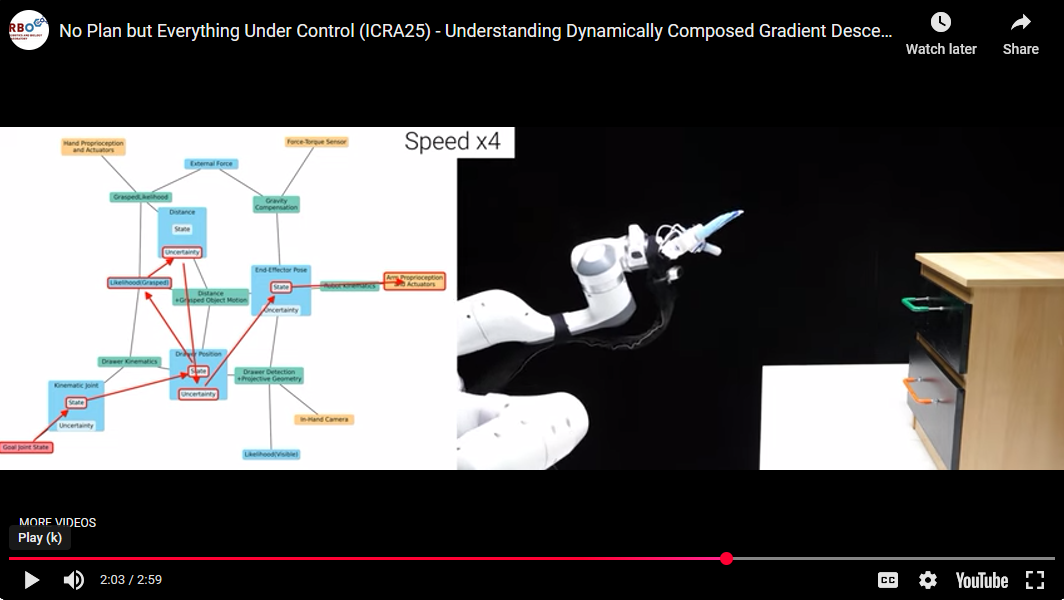
The paper introduces a system called AICON (Active InterCONnect), which models the world as a web of components, each estimating part of the state, and lets them interact actively. These interactions aren’t static: they change depending on the situation. As the world shifts, the system reshapes its own control strategy, always descending the most promising gradient toward the goal.
The result? A robot that doesn’t plan, but still completes intricate tasks, robustly and intelligently.
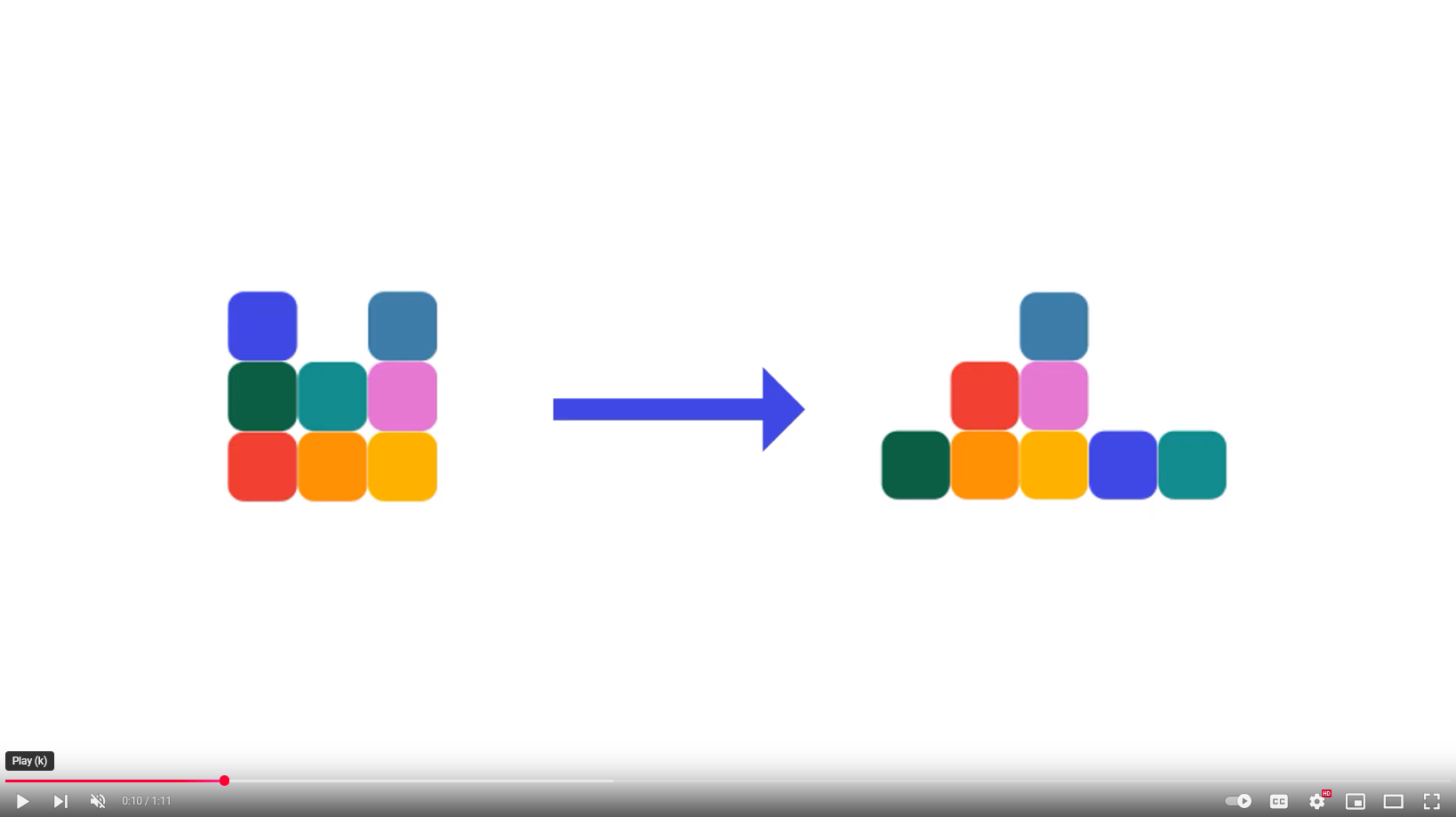
Solving blocks world without a plan
To test the method, the team turned to a classic AI challenge: Blocks world, where blocks need to be rearranged into a target configuration. Traditionally, this is thought to require a sequence of moves planned ahead—first clear a block, then move it, then repeat.
But with their approach, the robot doesn’t explicitly plan any sequence. Instead, the right behavior emerges from the interactions between sensory inputs, component estimates, and gradient signals. Subgoals, like clearing a block are not pre-programmed; they naturally arise when they become relevant.
While the method isn’t always optimal (it can miss shortcuts), it successfully completed complex block arrangements, including those that took 35+ steps, without any planning logic. This is a striking result: it suggests that robust sequential behavior can arise from feedback-based control alone.