Creating a robot that can integrate information from different sources and modalities
©SCIoI
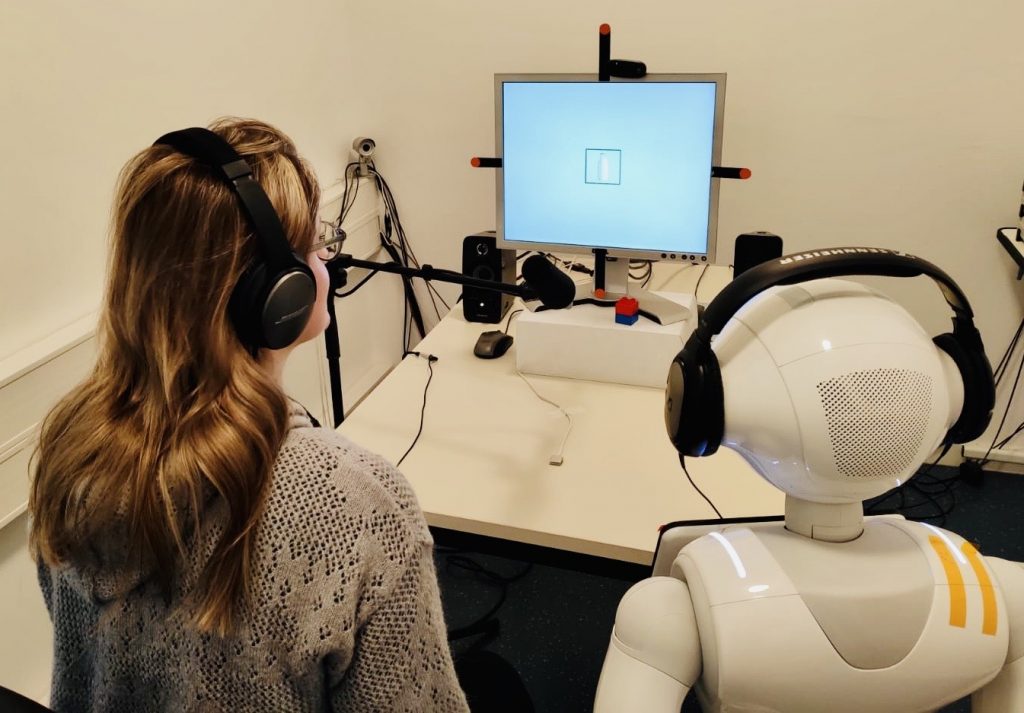
The overall goal of this project is to create a robot that can represent and integrate information from different sources and modalities for successful, task-oriented interactions with other agents. To fully understand the mechanisms of social interaction and communication in humans and to replicate this complex human skill in technological artifacts, we must provide effective means of knowledge transfer between agents. The first step of this project is therefore to describe core components and determinants of communicative behavior including joint attention, partner co-representation, information processing from different modalities and the role of motivation and personal relevance (Kaplan, and Hafner, 2006; Kuhlen & Abdel Rahman, 2017; Kuhlen et al., 2017). We will compare these functions in human-human, human-robot, and robot-robot interactions to identify commonalities and differences. This comparison will also consider the role of different presumed partner attributes (e.g., a robot described as “social” or “intelligent”). We will conduct behavioral, electrophysiological, and fMRI experiments to describe the microstructure of communicative behavior.The second step of the project is to create predictive models for multimodal communication that can account for these psychological findings in humans. Both the prerequisites and factors acting as priors will be identified, and suitable computational models will be developed that can represent multimodal sensory features in an abstract but biologically inspired way (suitable for extracting principles of intelligence; Schillaci et al., 2013). In perspective, the third step of this project is to use these models to generate novel predictions of social behavior in humans. Throughout the project we will focus on the processing of complex multimodal information, a central characteristic of social interactions, that have nevertheless thus far been investigated mostly within modalities. We assume that multimodal information, e.g. from auditory (speech) and visual (face, eye gaze) or tactile (touch) information, will augment the partner co-representation and will therefore improve communicative behavior.
Project Results
Social interactions are supported by the integration of multimodal signals. Successful social interaction and communication relies on the integration of multimodal information, social signals and the orchestration of different cognitive processes. In project 9, the team studied partner co-representation (i.e., the representation of the partner’s actions alongside one’s own actions), emotion processing, theory of mind (i.e., the ability to consider mental states – such as beliefs, desires, intentions – to predict people’s behaviour) and trust. They studied processes underlying social communication in humans and assessed potential changes in these processes when the interaction partner is an artificial agent. The team used this knowledge to implement similar mechanisms in their robots and assess how this affects their performance along other dimensions, such as trust or scaffolding with the ultimate goal to create robots with higher social intelligence that can interact successfully with humans and other agents.
On the analytic side, the team was able to characterize core components of communicative behaviour, such as partner co-representation, and proposed a promising framework to implement such modules in robots. They were also able to compare cognitive processes underlying communicative social interactions between human-human, human-robot, and human-computer, and to identify brain structures that encode information about the nature of the task partner. They could also show a top-down modulation of the effect as this was more pronounced in people who believed they were actually interacting with the partners as compared to those who didn’t. Moreover, they found that the attribution of social attributes to humanoid robots was significantly higher than to computers. Overall, these results suggest that people mentalize about the robot to some extent (e.g., by simulating/predicting their behavior) but not about the computer. Focusing on emotional speech processing, they found that visual cues of communicative intent (open eyes, direct gaze, and mouth movements) enhance emotional word processing with human speakers, but not with robot speakers, regardless of their degree of human-like appearance. Instead, differences were attributable to the degree of perceived animacy of the agent.
In addition, the team introduced the Brain-Based Turing Test, a novel test to discriminate between humans and artificial agents based on information implicitly encoded in the brain. They also investigated which features people use to distinguish between human and artificial agents in written interactions between humans or humans and chatbots and found high variability among participants in the characteristics that prompt them to decide for one or the other.
On the synthetic side, the team computationally modeled the selected core components of multimodal interaction and communication, including audiovisual associative memories for perceiving the environment, internal reward for generating actions, and a simple theory of mind model for determining partner specifics. The models were employed for playing interactive games, partner reliability assessment (i.e., selecting a trustworthy partner to perform a task), and partner-specific adaptation (i.e., differentiating the partner’s skills to complete a task). They noted that these tasks were carried out with the following interactive settings: 1) human-robot interaction, 2) robot-robot interaction, and 3) robot-multi-robot interaction.
What has the team learned about intelligence? How should the scientific output of this project affect future projects within SCIoI?
Social intelligence can be described as an orchestration of many different cognitive or mental functions and their interplay that support flexible navigations in the social world. Socially intelligent behavior can be best understood (and synthesized) by adopting such a holistic perspective.
The team also learned that there is high variability in the features that trigger the attribution of intelligence to artificial systems (reflecting the multifaceted nature of the concept of intelligence) and this should be taken into account when synthesizing intelligent agents to make sure everyone has pleasant experiences when interacting with them.
The computational models developed within the synthetic part of the project are well aligned with the definition of SCIoI’s intelligent behavior[1]. To be concrete, for example, these models enable synthetic agents (humanoid robots) to minimize the cost of perceptual processing (i.e., cost-effective) to select a reliable interaction partner that yields minimal cognitive load (i.e., goal-directed) on the robot. The team conducted experiments in a real-world setting where environmental noise was non-negligible in achieving the task.
[1] From SCIoI white paper: “Behavior is intelligent if it is adaptable, general, cost-effective, goaldirected, and can be performed in the real world.
Related Publications +
6984777
proj009
1
apa
50
creator
desc
year
20165
https://www.scienceofintelligence.de/wp-content/plugins/zotpress/
%7B%22status%22%3A%22success%22%2C%22updateneeded%22%3Afalse%2C%22instance%22%3Afalse%2C%22meta%22%3A%7B%22request_last%22%3A0%2C%22request_next%22%3A0%2C%22used_cache%22%3Atrue%7D%2C%22data%22%3A%5B%7B%22key%22%3A%22NF2ZHF8D%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Yun%20et%20al.%22%2C%22parsedDate%22%3A%222022%22%2C%22numChildren%22%3A1%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BYun%2C%20H.%20S.%2C%20H%26%23xFC%3Bbert%2C%20H.%2C%20Taliaronak%2C%20V.%2C%20Mayet%2C%20R.%2C%20Kirtay%2C%20M.%2C%20Hafner%2C%20V.%20V.%2C%20%26amp%3B%20Pinkwart%2C%20N.%20%282022%29.%20AI-Based%20Open-Source%20Gesture%20Retargeting%20to%26%23xA0%3Ba%26%23xA0%3BHumanoid%20Teaching%20Robot.%20In%20M.%20M.%20Rodrigo%2C%20N.%20Matsuda%2C%20A.%20I.%20Cristea%2C%20%26amp%3B%20V.%20Dimitrova%20%28Eds.%29%2C%20%26lt%3Bi%26gt%3BArtificial%20Intelligence%26%23xA0%3B%20in%20Education.%20Posters%20and%20Late%20Breaking%20Results%2C%20Workshops%20and%20Tutorials%2C%20Industry%20and%20Innovation%20Tracks%2C%20Practitioners%26%23x2019%3B%20and%20Doctoral%20Consortium%26lt%3B%5C%2Fi%26gt%3B%20%28pp.%20276%26%23x2013%3B279%29.%20Springer%20International%20Publishing.%20%26lt%3Ba%20class%3D%26%23039%3Bzp-DOIURL%26%23039%3B%20href%3D%26%23039%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1007%5C%2F978-3-031-11647-6_51%26%23039%3B%26gt%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1007%5C%2F978-3-031-11647-6_51%26lt%3B%5C%2Fa%26gt%3B%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22conferencePaper%22%2C%22title%22%3A%22AI-Based%20Open-Source%20Gesture%20Retargeting%20to%5Cu00a0a%5Cu00a0Humanoid%20Teaching%20Robot%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Hae%20Seon%22%2C%22lastName%22%3A%22Yun%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Heiko%22%2C%22lastName%22%3A%22H%5Cu00fcbert%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Volha%22%2C%22lastName%22%3A%22Taliaronak%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Ralf%22%2C%22lastName%22%3A%22Mayet%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Murat%22%2C%22lastName%22%3A%22Kirtay%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Verena%20V.%22%2C%22lastName%22%3A%22Hafner%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Niels%22%2C%22lastName%22%3A%22Pinkwart%22%7D%2C%7B%22creatorType%22%3A%22editor%22%2C%22firstName%22%3A%22Maria%20Mercedes%22%2C%22lastName%22%3A%22Rodrigo%22%7D%2C%7B%22creatorType%22%3A%22editor%22%2C%22firstName%22%3A%22Noburu%22%2C%22lastName%22%3A%22Matsuda%22%7D%2C%7B%22creatorType%22%3A%22editor%22%2C%22firstName%22%3A%22Alexandra%20I.%22%2C%22lastName%22%3A%22Cristea%22%7D%2C%7B%22creatorType%22%3A%22editor%22%2C%22firstName%22%3A%22Vania%22%2C%22lastName%22%3A%22Dimitrova%22%7D%5D%2C%22abstractNote%22%3A%22Gestures%20and%20speech%20modalities%20play%20potent%20roles%20in%20social%20learning%2C%20especially%20in%20educational%20settings.%20Enabling%20artificial%20learning%20companions%20%28i.e.%2C%20humanoid%20robots%29%20to%20perform%20human-like%20gestures%20and%20speech%20will%20facilitate%20interactive%20social%20learning%20in%20classrooms.%20In%20this%20paper%2C%20we%20present%20the%20implementation%20of%20human-generated%20gestures%20and%20speech%20on%20the%20Pepper%20robot%20to%20build%20a%20robotic%20teacher.%20To%20this%20end%2C%20we%20transferred%20a%20human%20teacher%20gesture%20to%20a%20humanoid%20robot%20using%20a%20web%20and%20a%20kinect%20cameras%20and%20applied%20a%20video-based%20markerless%20motion%20capture%20technology%20and%20an%20observation-based%20motion%20mirroring%20method.%20To%20evaluate%20the%20retargeting%20methods%2C%20we%20presented%20different%20types%20of%20a%20humanoid%20robotic%20teacher%20to%20six%20teachers%20and%20collect%20their%20impressions%20on%20the%20practical%20usage%20of%20a%20robotic%20teacher%20in%20the%20classroom.%20Our%20results%20show%20that%20the%20presented%20AI-based%20open-source%20gesture%20retargeting%20technology%20was%20found%20attractive%2C%20as%20it%20gives%20the%20teachers%20an%20agency%20to%20design%20and%20employ%20the%20Pepper%20robot%20in%20their%20classes.%20Future%20work%20entails%20the%20evaluation%20of%20our%20solution%20to%20the%20stakeholders%20%28i.e.%20teachers%29%20for%20its%20usability.%22%2C%22proceedingsTitle%22%3A%22Artificial%20Intelligence%20%20in%20Education.%20Posters%20and%20Late%20Breaking%20Results%2C%20Workshops%20and%20Tutorials%2C%20Industry%20and%20Innovation%20Tracks%2C%20Practitioners%5Cu2019%20and%20Doctoral%20Consortium%22%2C%22conferenceName%22%3A%22AIED%202022%22%2C%22date%22%3A%222022%22%2C%22eventPlace%22%3A%22%22%2C%22DOI%22%3A%2210.1007%5C%2F978-3-031-11647-6_51%22%2C%22ISBN%22%3A%22978-3-031-11647-6%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22%22%2C%22ISSN%22%3A%22%22%2C%22language%22%3A%22en%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-22T11%3A59%3A52Z%22%7D%7D%2C%7B%22key%22%3A%22C8E3VJQG%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Yun%20et%20al.%22%2C%22parsedDate%22%3A%222022%22%2C%22numChildren%22%3A0%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BYun%2C%20H.%20S.%2C%20Taliaronak%2C%20V.%2C%20Kirtay%2C%20M.%2C%20Chevel%26%23xE8%3Bre%2C%20J.%2C%20H%26%23xFC%3Bbert%2C%20H.%2C%20Hafner%2C%20V.%20V.%2C%20Pinkwart%2C%20N.%2C%20%26amp%3B%20Lazarides%2C%20R.%20%282022%29.%20%26lt%3Bi%26gt%3BChallenges%20in%20Designing%20Teacher%20Robots%20with%20Motivation%20Based%20Gestures%26lt%3B%5C%2Fi%26gt%3B%20%5BPoster%5D.%20Workshop%20on%20Robot%20Curiosity%20in%20Human-Robot%20Interaction%20%28RCHRI%29.%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22presentation%22%2C%22title%22%3A%22Challenges%20in%20Designing%20Teacher%20Robots%20with%20Motivation%20Based%20Gestures%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22Hae%20Seon%22%2C%22lastName%22%3A%22Yun%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22Volha%22%2C%22lastName%22%3A%22Taliaronak%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22Murat%22%2C%22lastName%22%3A%22Kirtay%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22Johann%22%2C%22lastName%22%3A%22Chevel%5Cu00e8re%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22Heiko%22%2C%22lastName%22%3A%22H%5Cu00fcbert%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22Verena%20V.%22%2C%22lastName%22%3A%22Hafner%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22Niels%22%2C%22lastName%22%3A%22Pinkwart%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22Rebecca%22%2C%22lastName%22%3A%22Lazarides%22%7D%5D%2C%22abstractNote%22%3A%22%22%2C%22date%22%3A%222022%22%2C%22sessionTitle%22%3A%22%22%2C%22DOI%22%3A%22%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22%22%2C%22language%22%3A%22%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-04T14%3A41%3A54Z%22%7D%7D%2C%7B%22key%22%3A%22C3WXKMJA%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Wudarczyk%20et%20al.%22%2C%22parsedDate%22%3A%222021-03-29%22%2C%22numChildren%22%3A1%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BWudarczyk%2C%20O.%20A.%2C%20Kirtay%2C%20M.%2C%20Kuhlen%2C%20A.%20K.%2C%20Abdel%20Rahman%2C%20R.%2C%20Haynes%2C%20J.-D.%2C%20Hafner%2C%20V.%20V.%2C%20%26amp%3B%20Pischedda%2C%20D.%20%282021%29.%20Bringing%20Together%20Robotics%2C%20Neuroscience%2C%20and%20Psychology%3A%20Lessons%20Learned%20From%20an%20Interdisciplinary%20Project.%20%26lt%3Bi%26gt%3BFrontiers%20in%20Human%20Neuroscience%26lt%3B%5C%2Fi%26gt%3B%2C%20%26lt%3Bi%26gt%3B15%26lt%3B%5C%2Fi%26gt%3B%2C%20630789.%20%26lt%3Ba%20class%3D%26%23039%3Bzp-DOIURL%26%23039%3B%20href%3D%26%23039%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.3389%5C%2Ffnhum.2021.630789%26%23039%3B%26gt%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.3389%5C%2Ffnhum.2021.630789%26lt%3B%5C%2Fa%26gt%3B%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22journalArticle%22%2C%22title%22%3A%22Bringing%20Together%20Robotics%2C%20Neuroscience%2C%20and%20Psychology%3A%20Lessons%20Learned%20From%20an%20Interdisciplinary%20Project%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Olga%20A.%22%2C%22lastName%22%3A%22Wudarczyk%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Murat%22%2C%22lastName%22%3A%22Kirtay%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Anna%20K.%22%2C%22lastName%22%3A%22Kuhlen%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Rasha%22%2C%22lastName%22%3A%22Abdel%20Rahman%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22John-Dylan%22%2C%22lastName%22%3A%22Haynes%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Verena%20V.%22%2C%22lastName%22%3A%22Hafner%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Doris%22%2C%22lastName%22%3A%22Pischedda%22%7D%5D%2C%22abstractNote%22%3A%22The%20diversified%20methodology%20and%20expertise%20of%20interdisciplinary%20research%20teams%20provide%20the%20opportunity%20to%20overcome%20the%20limited%20perspectives%20of%20individual%20disciplines.%20This%20is%20particularly%20true%20at%20the%20interface%20of%20Robotics%2C%20Neuroscience%2C%20and%20Psychology%20as%20the%20three%20fields%20have%20quite%20different%20perspectives%20and%20approaches%20to%20offer.%20Nonetheless%2C%20aligning%20backgrounds%20and%20interdisciplinary%20expectations%20can%20present%20challenges%20due%20to%20varied%20research%20cultures%20and%20practices.%20Overcoming%20these%20challenges%20stands%20at%20the%20beginning%20of%20each%20productive%20collaboration%20and%20thus%20is%20a%20mandatory%20step%20in%20cognitive%20neurorobotics.%20In%20this%20article%2C%20we%20share%20eight%20lessons%20that%20we%20learned%20from%20our%20ongoing%20interdisciplinary%20project%20on%20human-robot%20and%20robot-robot%20interaction%20in%20social%20settings.%20These%20lessons%20provide%20practical%20advice%20for%20scientists%20initiating%20interdisciplinary%20research%20endeavors.%20Our%20advice%20can%20help%20to%20avoid%20early%20problems%20and%20deal%20with%20differences%20between%20research%20fields%2C%20prepare%20for%20and%20anticipate%20challenges%2C%20align%20project%20expectations%2C%20and%20speed%20up%20research%20progress%2C%20thus%20promoting%20effective%20interdisciplinary%20research%20across%20Robotics%2C%20Neuroscience%2C%20and%20Psychology.%22%2C%22date%22%3A%222021-3-29%22%2C%22section%22%3A%22%22%2C%22partNumber%22%3A%22%22%2C%22partTitle%22%3A%22%22%2C%22DOI%22%3A%2210.3389%5C%2Ffnhum.2021.630789%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22https%3A%5C%2F%5C%2Fwww.frontiersin.org%5C%2Farticles%5C%2F10.3389%5C%2Ffnhum.2021.630789%5C%2Ffull%22%2C%22PMID%22%3A%22%22%2C%22PMCID%22%3A%22%22%2C%22ISSN%22%3A%221662-5161%22%2C%22language%22%3A%22%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-22T11%3A47%3A34Z%22%7D%7D%2C%7B%22key%22%3A%2244J5V492%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Wudarczyk%20et%20al.%22%2C%22parsedDate%22%3A%222021-08-18%22%2C%22numChildren%22%3A1%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BWudarczyk%2C%20O.%20A.%2C%20Kirtay%2C%20M.%2C%20Pischedda%2C%20D.%2C%20Hafner%2C%20V.%20V.%2C%20Haynes%2C%20J.-D.%2C%20Kuhlen%2C%20A.%20K.%2C%20%26amp%3B%20Abdel%20Rahman%2C%20R.%20%282021%29.%20Robots%20facilitate%20human%20language%20production.%20%26lt%3Bi%26gt%3BScientific%20Reports%26lt%3B%5C%2Fi%26gt%3B%2C%20%26lt%3Bi%26gt%3B11%26lt%3B%5C%2Fi%26gt%3B%281%29%2C%2016737.%20%26lt%3Ba%20class%3D%26%23039%3Bzp-DOIURL%26%23039%3B%20href%3D%26%23039%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1038%5C%2Fs41598-021-95645-9%26%23039%3B%26gt%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1038%5C%2Fs41598-021-95645-9%26lt%3B%5C%2Fa%26gt%3B%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22journalArticle%22%2C%22title%22%3A%22Robots%20facilitate%20human%20language%20production%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Olga%20A.%22%2C%22lastName%22%3A%22Wudarczyk%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Murat%22%2C%22lastName%22%3A%22Kirtay%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Doris%22%2C%22lastName%22%3A%22Pischedda%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Verena%20V.%22%2C%22lastName%22%3A%22Hafner%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22John-Dylan%22%2C%22lastName%22%3A%22Haynes%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Anna%20K.%22%2C%22lastName%22%3A%22Kuhlen%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Rasha%22%2C%22lastName%22%3A%22Abdel%20Rahman%22%7D%5D%2C%22abstractNote%22%3A%22Abstract%5Cn%20%20%20%20%20%20%20%20%20%20%20%20Despite%20recent%20developments%20in%20integrating%20autonomous%20and%20human-like%20robots%20into%20many%20aspects%20of%20everyday%20life%2C%20social%20interactions%20with%20robots%20are%20still%20a%20challenge.%20Here%2C%20we%20focus%20on%20a%20central%20tool%20for%20social%20interaction%3A%20verbal%20communication.%20We%20assess%20the%20extent%20to%20which%20humans%20co-represent%20%28simulate%20and%20predict%29%20a%20robot%5Cu2019s%20verbal%20actions.%20During%20a%20joint%20picture%20naming%20task%2C%20participants%20took%20turns%20in%20naming%20objects%20together%20with%20a%20social%20robot%20%28Pepper%2C%20Softbank%20Robotics%29.%20Previous%20findings%20using%20this%20task%20with%20human%20partners%20revealed%20internal%20simulations%20on%20behalf%20of%20the%20partner%20down%20to%20the%20level%20of%20selecting%20words%20from%20the%20mental%20lexicon%2C%20reflected%20in%20partner-elicited%20inhibitory%20effects%20on%20subsequent%20naming.%20Here%2C%20with%20the%20robot%2C%20the%20partner-elicited%20inhibitory%20effects%20were%20not%20observed.%20Instead%2C%20naming%20was%20facilitated%2C%20as%20revealed%20by%20faster%20naming%20of%20word%20categories%20co-named%20with%20the%20robot.%20This%20facilitation%20suggests%20that%20robots%2C%20unlike%20humans%2C%20are%20not%20simulated%20down%20to%20the%20level%20of%20lexical%20selection.%20Instead%2C%20a%20robot%5Cu2019s%20speaking%20appears%20to%20be%20simulated%20at%20the%20initial%20level%20of%20language%20production%20where%20the%20meaning%20of%20the%20verbal%20message%20is%20generated%2C%20resulting%20in%20facilitated%20language%20production%20due%20to%20conceptual%20priming.%20We%20conclude%20that%20robots%20facilitate%20core%20conceptualization%20processes%20when%20humans%20transform%20thoughts%20to%20language%20during%20speaking.%22%2C%22date%22%3A%222021-08-18%22%2C%22section%22%3A%22%22%2C%22partNumber%22%3A%22%22%2C%22partTitle%22%3A%22%22%2C%22DOI%22%3A%2210.1038%5C%2Fs41598-021-95645-9%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22https%3A%5C%2F%5C%2Fwww.nature.com%5C%2Farticles%5C%2Fs41598-021-95645-9%22%2C%22PMID%22%3A%22%22%2C%22PMCID%22%3A%22%22%2C%22ISSN%22%3A%222045-2322%22%2C%22language%22%3A%22en%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-22T11%3A47%3A55Z%22%7D%7D%2C%7B%22key%22%3A%228Y2CDZTD%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Spatola%20and%20Wudarczyk%22%2C%22parsedDate%22%3A%222021%22%2C%22numChildren%22%3A1%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BSpatola%2C%20N.%2C%20%26amp%3B%20Wudarczyk%2C%20O.%20A.%20%282021%29.%20Ascribing%20emotions%20to%20robots%3A%20Explicit%20and%20implicit%20attribution%20of%20emotions%20and%20perceived%20robot%20anthropomorphism.%20%26lt%3Bi%26gt%3BComputers%20in%20Human%20Behavior%26lt%3B%5C%2Fi%26gt%3B%2C%20%26lt%3Bi%26gt%3B124%26lt%3B%5C%2Fi%26gt%3B%2C%20106934.%20%26lt%3Ba%20class%3D%26%23039%3Bzp-DOIURL%26%23039%3B%20href%3D%26%23039%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1016%5C%2Fj.chb.2021.106934%26%23039%3B%26gt%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1016%5C%2Fj.chb.2021.106934%26lt%3B%5C%2Fa%26gt%3B%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22journalArticle%22%2C%22title%22%3A%22Ascribing%20emotions%20to%20robots%3A%20Explicit%20and%20implicit%20attribution%20of%20emotions%20and%20perceived%20robot%20anthropomorphism%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Nicolas%22%2C%22lastName%22%3A%22Spatola%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Olga%20A.%22%2C%22lastName%22%3A%22Wudarczyk%22%7D%5D%2C%22abstractNote%22%3A%22%22%2C%22date%22%3A%2211%5C%2F2021%22%2C%22section%22%3A%22%22%2C%22partNumber%22%3A%22%22%2C%22partTitle%22%3A%22%22%2C%22DOI%22%3A%2210.1016%5C%2Fj.chb.2021.106934%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22https%3A%5C%2F%5C%2Flinkinghub.elsevier.com%5C%2Fretrieve%5C%2Fpii%5C%2FS0747563221002570%22%2C%22PMID%22%3A%22%22%2C%22PMCID%22%3A%22%22%2C%22ISSN%22%3A%2207475632%22%2C%22language%22%3A%22en%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-22T11%3A55%3A58Z%22%7D%7D%2C%7B%22key%22%3A%22ZAAJ9MDY%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Spatola%20and%20Wudarczyk%22%2C%22parsedDate%22%3A%222021%22%2C%22numChildren%22%3A1%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BSpatola%2C%20N.%2C%20%26amp%3B%20Wudarczyk%2C%20O.%20A.%20%282021%29.%20Implicit%20Attitudes%20Towards%20Robots%20Predict%20Explicit%20Attitudes%2C%20Semantic%20Distance%20Between%20Robots%20and%20Humans%2C%20Anthropomorphism%2C%20and%20Prosocial%20Behavior%3A%20From%20Attitudes%20to%20Human%26%23x2013%3BRobot%20Interaction.%20%26lt%3Bi%26gt%3BInternational%20Journal%20of%20Social%20Robotics%26lt%3B%5C%2Fi%26gt%3B%2C%20%26lt%3Bi%26gt%3B13%26lt%3B%5C%2Fi%26gt%3B%285%29%2C%201149%26%23x2013%3B1159.%20%26lt%3Ba%20class%3D%26%23039%3Bzp-DOIURL%26%23039%3B%20href%3D%26%23039%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1007%5C%2Fs12369-020-00701-5%26%23039%3B%26gt%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1007%5C%2Fs12369-020-00701-5%26lt%3B%5C%2Fa%26gt%3B%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22journalArticle%22%2C%22title%22%3A%22Implicit%20Attitudes%20Towards%20Robots%20Predict%20Explicit%20Attitudes%2C%20Semantic%20Distance%20Between%20Robots%20and%20Humans%2C%20Anthropomorphism%2C%20and%20Prosocial%20Behavior%3A%20From%20Attitudes%20to%20Human%5Cu2013Robot%20Interaction%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Nicolas%22%2C%22lastName%22%3A%22Spatola%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Olga%20A.%22%2C%22lastName%22%3A%22Wudarczyk%22%7D%5D%2C%22abstractNote%22%3A%22Abstract%5Cn%20%20%20%20%20%20%20%20%20%20%20%20How%20people%20behave%20towards%20others%20relies%2C%20to%20a%20large%20extent%2C%20on%20the%20prior%20attitudes%20that%20they%20hold%20towards%20them.%20In%20Human%5Cu2013Robot%20Interactions%2C%20individual%20attitudes%20towards%20robots%20have%20mostly%20been%20investigated%20via%20explicit%20reports%20that%20can%20be%20biased%20by%20various%20conscious%20processes.%20In%20the%20present%20study%2C%20we%20introduce%20an%20implicit%20measure%20of%20attitudes%20towards%20robots.%20The%20task%20utilizes%20the%20measure%20of%20semantic%20priming%20to%20evaluate%20whether%20participants%20consider%20humans%20and%20robots%20as%20similar%20or%20different.%20Our%20results%20demonstrate%20a%20link%20between%20implicit%20semantic%20distance%20between%20humans%20and%20robots%20and%20explicit%20attitudes%20towards%20robots%2C%20explicit%20semantic%20distance%20between%20robots%20and%20humans%2C%20perceived%20robot%20anthropomorphism%2C%20and%20pro%5C%2Fanti-social%20behavior%20towards%20a%20robot%20in%20a%20real%20life%2C%20interactive%20scenario.%20Specifically%2C%20attenuated%20semantic%20distance%20between%20humans%20and%20robots%20in%20the%20implicit%20task%20predicted%20more%20positive%20explicit%20attitudes%20towards%20robots%2C%20attenuated%20explicit%20semantic%20distance%20between%20humans%20and%20robots%2C%20attribution%20of%20an%20anthropomorphic%20characteristic%2C%20and%20consequently%20a%20future%20prosocial%20behavior%20towards%20a%20robot.%20Crucially%2C%20the%20implicit%20measure%20of%20attitudes%20towards%20robots%20%28implicit%20semantic%20distance%29%20was%20a%20better%20predictor%20of%20a%20future%20behavior%20towards%20the%20robot%20than%20explicit%20measure%20of%20attitudes%20towards%20robots%20%28self-reported%20attitudes%29.%20Cumulatively%2C%20the%20current%20results%20emphasize%20a%20new%20approach%20to%20measure%20implicit%20attitudes%20towards%20robots%2C%20and%20offer%20a%20starting%20point%20for%20further%20investigations%20of%20implicit%20processing%20of%20robots.%22%2C%22date%22%3A%2208%5C%2F2021%22%2C%22section%22%3A%22%22%2C%22partNumber%22%3A%22%22%2C%22partTitle%22%3A%22%22%2C%22DOI%22%3A%2210.1007%5C%2Fs12369-020-00701-5%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22https%3A%5C%2F%5C%2Flink.springer.com%5C%2F10.1007%5C%2Fs12369-020-00701-5%22%2C%22PMID%22%3A%22%22%2C%22PMCID%22%3A%22%22%2C%22ISSN%22%3A%221875-4791%2C%201875-4805%22%2C%22language%22%3A%22en%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-22T11%3A46%3A58Z%22%7D%7D%2C%7B%22key%22%3A%22M7TJFQRK%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Pischedda%20et%20al.%22%2C%22parsedDate%22%3A%222023-08-28%22%2C%22numChildren%22%3A0%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BPischedda%2C%20D.%2C%20Kaufmann%2C%20V.%2C%20Wudarczyk%2C%20O.%20A.%2C%20Rahman%2C%20R.%20A.%2C%20Hafner%2C%20V.%20V.%2C%20Kuhlen%2C%20A.%20K.%2C%20%26amp%3B%20Haynes%2C%20J.-D.%20%282023%29.%20Human%20or%20AI%3F%20The%20brain%20knows%20it%21%20A%20brain-based%20Turing%20Test%20to%20discriminate%20between%20human%20and%20artificial%20agents.%20%26lt%3Bi%26gt%3B2023%2032nd%20IEEE%20International%20Conference%20on%20Robot%20and%20Human%20Interactive%20Communication%20%28RO-MAN%29%26lt%3B%5C%2Fi%26gt%3B%2C%20951%26%23x2013%3B958.%20%26lt%3Ba%20class%3D%26%23039%3Bzp-DOIURL%26%23039%3B%20href%3D%26%23039%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1109%5C%2FRO-MAN57019.2023.10309541%26%23039%3B%26gt%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1109%5C%2FRO-MAN57019.2023.10309541%26lt%3B%5C%2Fa%26gt%3B%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22conferencePaper%22%2C%22title%22%3A%22Human%20or%20AI%3F%20The%20brain%20knows%20it%21%20A%20brain-based%20Turing%20Test%20to%20discriminate%20between%20human%20and%20artificial%20agents.%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Doris%22%2C%22lastName%22%3A%22Pischedda%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Vanessa%22%2C%22lastName%22%3A%22Kaufmann%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Olga%20A.%22%2C%22lastName%22%3A%22Wudarczyk%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Rasha%20Abdel%22%2C%22lastName%22%3A%22Rahman%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Verena%20V.%22%2C%22lastName%22%3A%22Hafner%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Anna%20K.%22%2C%22lastName%22%3A%22Kuhlen%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22John-Dylan%22%2C%22lastName%22%3A%22Haynes%22%7D%5D%2C%22abstractNote%22%3A%22%22%2C%22proceedingsTitle%22%3A%222023%2032nd%20IEEE%20International%20Conference%20on%20Robot%20and%20Human%20Interactive%20Communication%20%28RO-MAN%29%22%2C%22conferenceName%22%3A%222023%2032nd%20IEEE%20International%20Conference%20on%20Robot%20and%20Human%20Interactive%20Communication%20%28RO-MAN%29%22%2C%22date%22%3A%222023-8-28%22%2C%22eventPlace%22%3A%22%22%2C%22DOI%22%3A%2210.1109%5C%2FRO-MAN57019.2023.10309541%22%2C%22ISBN%22%3A%22979-8-3503-3670-2%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22https%3A%5C%2F%5C%2Fieeexplore.ieee.org%5C%2Fdocument%5C%2F10309541%5C%2F%22%2C%22ISSN%22%3A%22%22%2C%22language%22%3A%22%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-22T11%3A56%3A01Z%22%7D%7D%2C%7B%22key%22%3A%22EE3F5XLC%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Pischedda%20et%20al.%22%2C%22parsedDate%22%3A%222023-09%22%2C%22numChildren%22%3A0%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BPischedda%2C%20D.%2C%20Erener%2C%20%26%23x15E%3B.%2C%20Kuhlen%2C%20A.%2C%20%26amp%3B%20Haynes%2C%20J.-D.%20%282023%2C%20September%29.%20%26lt%3Bi%26gt%3BHow%20Do%20People%20Discriminate%20Conversations%20Generated%20By%20Humans%20And%20Artificial%20Intelligence%3F%20The%20Role%20Of%20Individual%20Variability%20On%20People%26%23x2019%3Bs%20Judgment%26lt%3B%5C%2Fi%26gt%3B%20%5BPoster%5D.%2023rd%20Conference%20of%20the%20European%20Society%20for%20Cognitive%20Psychology%20%28ESCOP%29.%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22presentation%22%2C%22title%22%3A%22How%20Do%20People%20Discriminate%20Conversations%20Generated%20By%20Humans%20And%20Artificial%20Intelligence%3F%20The%20Role%20Of%20Individual%20Variability%20On%20People%27s%20Judgment%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22Doris%22%2C%22lastName%22%3A%22Pischedda%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22%5Cu015eafak%22%2C%22lastName%22%3A%22Erener%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22Anna%22%2C%22lastName%22%3A%22Kuhlen%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22John-Dylan%22%2C%22lastName%22%3A%22Haynes%22%7D%5D%2C%22abstractNote%22%3A%22%22%2C%22date%22%3A%222023-09%22%2C%22sessionTitle%22%3A%22%22%2C%22DOI%22%3A%22%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22%22%2C%22language%22%3A%22%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-16T08%3A51%3A53Z%22%7D%7D%2C%7B%22key%22%3A%22GGYFJ25P%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Pischedda%20et%20al.%22%2C%22parsedDate%22%3A%222021%22%2C%22numChildren%22%3A0%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BPischedda%2C%20D.%2C%20Lange%2C%20A.%2C%20Kirtay%2C%20M.%2C%20Wudarczyk%2C%20O.%2C%20Abdel%20Rahman%2C%20R.%2C%20Hafner%2C%20V.%20V.%2C%20Kuhlen%2C%20A.%20K.%2C%20%26amp%3B%20Haynes%2C%20J.-D.%20%282021%29.%20%26lt%3Bi%26gt%3BWho%20is%20my%20interlocutor%3F%20Partner-specific%20neural%20representations%20during%20communicative%20interactions%20with%20human%20or%20artificial%20task%20partners.%26lt%3B%5C%2Fi%26gt%3B%20%5BPoster%5D.%205th%20Virtual%20Social%20Interactions%20%28VSI%29%20Conference.%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22presentation%22%2C%22title%22%3A%22Who%20is%20my%20interlocutor%3F%20Partner-specific%20neural%20representations%20during%20communicative%20interactions%20with%20human%20or%20artificial%20task%20partners.%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22D.%22%2C%22lastName%22%3A%22Pischedda%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22A.%22%2C%22lastName%22%3A%22Lange%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22M.%22%2C%22lastName%22%3A%22Kirtay%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22O.%22%2C%22lastName%22%3A%22Wudarczyk%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22R.%22%2C%22lastName%22%3A%22Abdel%20Rahman%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22V.%20V.%22%2C%22lastName%22%3A%22Hafner%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22A.%20K.%22%2C%22lastName%22%3A%22Kuhlen%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22J.-D.%22%2C%22lastName%22%3A%22Haynes%22%7D%5D%2C%22abstractNote%22%3A%22none%22%2C%22date%22%3A%222021%22%2C%22sessionTitle%22%3A%22%22%2C%22DOI%22%3A%22%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22%22%2C%22language%22%3A%22%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-04T14%3A30%3A27Z%22%7D%7D%2C%7B%22key%22%3A%2252TCGL4Z%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Pischedda%20et%20al.%22%2C%22parsedDate%22%3A%222021%22%2C%22numChildren%22%3A0%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BPischedda%2C%20D.%2C%20Lange%2C%20A.%2C%20Kirtay%2C%20M.%2C%20Wudarczyk%2C%20O.%2C%20Abdel%20Rahman%2C%20R.%2C%20Hafner%2C%20V.%20V.%2C%20Kuhlen%2C%20A.%20K.%2C%20%26amp%3B%20Haynes%2C%20J.-D.%20%282021%29.%20%26lt%3Bi%26gt%3BAm%20I%20speaking%20to%20a%20human%2C%20a%20robot%2C%20or%20a%20computer%3F%20Neural%20representations%20of%20task%20partners%20in%20communicative%20interactions%20with%20humans%20or%20artificial%20agents%26lt%3B%5C%2Fi%26gt%3B%20%5BPoster%5D.%20Annual%20Meeting%20of%20the%20Society%20for%20Neuroscience%20%28SfN%29.%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22presentation%22%2C%22title%22%3A%22Am%20I%20speaking%20to%20a%20human%2C%20a%20robot%2C%20or%20a%20computer%3F%20Neural%20representations%20of%20task%20partners%20in%20communicative%20interactions%20with%20humans%20or%20artificial%20agents%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22D.%22%2C%22lastName%22%3A%22Pischedda%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22A.%22%2C%22lastName%22%3A%22Lange%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22M.%22%2C%22lastName%22%3A%22Kirtay%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22O.%22%2C%22lastName%22%3A%22Wudarczyk%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22R.%22%2C%22lastName%22%3A%22Abdel%20Rahman%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22V.%20V.%22%2C%22lastName%22%3A%22Hafner%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22A.%20K.%22%2C%22lastName%22%3A%22Kuhlen%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22J.-D.%22%2C%22lastName%22%3A%22Haynes%22%7D%5D%2C%22abstractNote%22%3A%22none%22%2C%22date%22%3A%222021%22%2C%22sessionTitle%22%3A%22%22%2C%22DOI%22%3A%22%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22%22%2C%22language%22%3A%22%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-04T14%3A23%3A32Z%22%7D%7D%2C%7B%22key%22%3A%22F82EAIAD%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Pischedda%22%2C%22parsedDate%22%3A%222025%22%2C%22numChildren%22%3A0%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BPischedda%2C%20D.%20%282025%29.%20%26lt%3Bi%26gt%3BHow%20do%20people%20discriminate%20conversations%20generated%20by%20humans%20and%20artificial%20intelligence%3F%20The%20role%20of%20individual%20variability%20on%20people%26%23x2019%3Bs%20judgment%26lt%3B%5C%2Fi%26gt%3B%20%5BPoster%5D.%20Giornata%20sul%20pensiero.%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22presentation%22%2C%22title%22%3A%22How%20do%20people%20discriminate%20conversations%20generated%20by%20humans%20and%20artificial%20intelligence%3F%20The%20role%20of%20individual%20variability%20on%20people%27s%20judgment%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22Doris%22%2C%22lastName%22%3A%22Pischedda%22%7D%5D%2C%22abstractNote%22%3A%22%22%2C%22date%22%3A%222025%22%2C%22sessionTitle%22%3A%22%22%2C%22DOI%22%3A%22%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22%22%2C%22language%22%3A%22%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-22T10%3A44%3A39Z%22%7D%7D%2C%7B%22key%22%3A%22SYX5FJ6A%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Kirtay%20et%20al.%22%2C%22parsedDate%22%3A%222022-08-29%22%2C%22numChildren%22%3A0%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BKirtay%2C%20M.%2C%20Oztop%2C%20E.%2C%20Kuhlen%2C%20A.%20K.%2C%20Asada%2C%20M.%2C%20%26amp%3B%20Hafner%2C%20V.%20V.%20%282022%29.%20Trustworthiness%20assessment%20in%20multimodal%20human-robot%20interaction%20based%20on%20cognitive%20load.%20%26lt%3Bi%26gt%3B2022%2031st%20IEEE%20International%20Conference%20on%20Robot%20and%20Human%20Interactive%20Communication%20%28RO-MAN%29%26lt%3B%5C%2Fi%26gt%3B%2C%20469%26%23x2013%3B476.%20%26lt%3Ba%20class%3D%26%23039%3Bzp-DOIURL%26%23039%3B%20href%3D%26%23039%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1109%5C%2FRO-MAN53752.2022.9900730%26%23039%3B%26gt%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1109%5C%2FRO-MAN53752.2022.9900730%26lt%3B%5C%2Fa%26gt%3B%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22conferencePaper%22%2C%22title%22%3A%22Trustworthiness%20assessment%20in%20multimodal%20human-robot%20interaction%20based%20on%20cognitive%20load%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Murat%22%2C%22lastName%22%3A%22Kirtay%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Erhan%22%2C%22lastName%22%3A%22Oztop%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Anna%20K.%22%2C%22lastName%22%3A%22Kuhlen%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Minoru%22%2C%22lastName%22%3A%22Asada%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Verena%20V.%22%2C%22lastName%22%3A%22Hafner%22%7D%5D%2C%22abstractNote%22%3A%22%22%2C%22proceedingsTitle%22%3A%222022%2031st%20IEEE%20International%20Conference%20on%20Robot%20and%20Human%20Interactive%20Communication%20%28RO-MAN%29%22%2C%22conferenceName%22%3A%222022%2031st%20IEEE%20International%20Conference%20on%20Robot%20and%20Human%20Interactive%20Communication%20%28RO-MAN%29%22%2C%22date%22%3A%222022-8-29%22%2C%22eventPlace%22%3A%22%22%2C%22DOI%22%3A%2210.1109%5C%2FRO-MAN53752.2022.9900730%22%2C%22ISBN%22%3A%22978-1-7281-8859-1%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22https%3A%5C%2F%5C%2Fieeexplore.ieee.org%5C%2Fdocument%5C%2F9900730%5C%2F%22%2C%22ISSN%22%3A%22%22%2C%22language%22%3A%22%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-22T11%3A52%3A31Z%22%7D%7D%2C%7B%22key%22%3A%22XG4LHGJM%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Kirtay%20et%20al.%22%2C%22parsedDate%22%3A%222022-09-12%22%2C%22numChildren%22%3A0%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BKirtay%2C%20M.%2C%20Oztop%2C%20E.%2C%20Kuhlen%2C%20A.%20K.%2C%20Asada%2C%20M.%2C%20%26amp%3B%20Hafner%2C%20V.%20V.%20%282022%29.%20Forming%20robot%20trust%20in%20heterogeneous%20agents%20during%20a%20multimodal%20interactive%20game.%20%26lt%3Bi%26gt%3B2022%20IEEE%20International%20Conference%20on%20Development%20and%20Learning%20%28ICDL%29%26lt%3B%5C%2Fi%26gt%3B%2C%20307%26%23x2013%3B313.%20%26lt%3Ba%20class%3D%26%23039%3Bzp-DOIURL%26%23039%3B%20href%3D%26%23039%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1109%5C%2FICDL53763.2022.9962212%26%23039%3B%26gt%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1109%5C%2FICDL53763.2022.9962212%26lt%3B%5C%2Fa%26gt%3B%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22conferencePaper%22%2C%22title%22%3A%22Forming%20robot%20trust%20in%20heterogeneous%20agents%20during%20a%20multimodal%20interactive%20game%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Murat%22%2C%22lastName%22%3A%22Kirtay%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Erhan%22%2C%22lastName%22%3A%22Oztop%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Anna%20K.%22%2C%22lastName%22%3A%22Kuhlen%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Minoru%22%2C%22lastName%22%3A%22Asada%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Verena%20V.%22%2C%22lastName%22%3A%22Hafner%22%7D%5D%2C%22abstractNote%22%3A%22%22%2C%22proceedingsTitle%22%3A%222022%20IEEE%20International%20Conference%20on%20Development%20and%20Learning%20%28ICDL%29%22%2C%22conferenceName%22%3A%222022%20IEEE%20International%20Conference%20on%20Development%20and%20Learning%20%28ICDL%29%22%2C%22date%22%3A%222022-9-12%22%2C%22eventPlace%22%3A%22%22%2C%22DOI%22%3A%2210.1109%5C%2FICDL53763.2022.9962212%22%2C%22ISBN%22%3A%22978-1-6654-1311-4%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22https%3A%5C%2F%5C%2Fieeexplore.ieee.org%5C%2Fdocument%5C%2F9962212%5C%2F%22%2C%22ISSN%22%3A%22%22%2C%22language%22%3A%22%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-22T11%3A52%3A35Z%22%7D%7D%2C%7B%22key%22%3A%22BRDPPFYJ%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Kirtay%20et%20al.%22%2C%22parsedDate%22%3A%222023%22%2C%22numChildren%22%3A1%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BKirtay%2C%20M.%2C%20Hafner%2C%20V.%20V.%2C%20Asada%2C%20M.%2C%20%26amp%3B%20Oztop%2C%20E.%20%282023%29.%20Trust%20in%20Robot%26%23x2013%3BRobot%20Scaffolding.%20%26lt%3Bi%26gt%3BIEEE%20Transactions%20on%20Cognitive%20and%20Developmental%20Systems%26lt%3B%5C%2Fi%26gt%3B%2C%20%26lt%3Bi%26gt%3B15%26lt%3B%5C%2Fi%26gt%3B%284%29%2C%201841%26%23x2013%3B1852.%20%26lt%3Ba%20class%3D%26%23039%3Bzp-DOIURL%26%23039%3B%20href%3D%26%23039%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1109%5C%2FTCDS.2023.3235974%26%23039%3B%26gt%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1109%5C%2FTCDS.2023.3235974%26lt%3B%5C%2Fa%26gt%3B%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22journalArticle%22%2C%22title%22%3A%22Trust%20in%20Robot%5Cu2013Robot%20Scaffolding%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Murat%22%2C%22lastName%22%3A%22Kirtay%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Verena%20V.%22%2C%22lastName%22%3A%22Hafner%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Minoru%22%2C%22lastName%22%3A%22Asada%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Erhan%22%2C%22lastName%22%3A%22Oztop%22%7D%5D%2C%22abstractNote%22%3A%22%22%2C%22date%22%3A%2212%5C%2F2023%22%2C%22section%22%3A%22%22%2C%22partNumber%22%3A%22%22%2C%22partTitle%22%3A%22%22%2C%22DOI%22%3A%2210.1109%5C%2FTCDS.2023.3235974%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22https%3A%5C%2F%5C%2Fieeexplore.ieee.org%5C%2Fdocument%5C%2F10014434%5C%2F%22%2C%22PMID%22%3A%22%22%2C%22PMCID%22%3A%22%22%2C%22ISSN%22%3A%222379-8920%2C%202379-8939%22%2C%22language%22%3A%22%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-22T11%3A52%3A28Z%22%7D%7D%2C%7B%22key%22%3A%22N647NDS3%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Kirtay%20et%20al.%22%2C%22parsedDate%22%3A%222020-10-26%22%2C%22numChildren%22%3A1%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BKirtay%2C%20M.%2C%20Wudarczyk%2C%20O.%20A.%2C%20Pischedda%2C%20D.%2C%20Kuhlen%2C%20A.%20K.%2C%20Rahman%2C%20R.%20A.%2C%20Haynes%2C%20J.-D.%2C%20%26amp%3B%20Hafner%2C%20V.%20V.%20%282020%29.%20Modeling%20robot%20co-representation%3A%20state-of-the-art%2C%20open%20issues%2C%20and%20predictive%20learning%20as%20a%20possible%20framework.%20%26lt%3Bi%26gt%3B2020%20Joint%20IEEE%2010th%20International%20Conference%20on%20Development%20and%20Learning%20and%20Epigenetic%20Robotics%20%28ICDL-EpiRob%29%26lt%3B%5C%2Fi%26gt%3B%2C%201%26%23x2013%3B8.%20%26lt%3Ba%20class%3D%26%23039%3Bzp-DOIURL%26%23039%3B%20href%3D%26%23039%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1109%5C%2FICDL-EpiRob48136.2020.9278031%26%23039%3B%26gt%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1109%5C%2FICDL-EpiRob48136.2020.9278031%26lt%3B%5C%2Fa%26gt%3B%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22conferencePaper%22%2C%22title%22%3A%22Modeling%20robot%20co-representation%3A%20state-of-the-art%2C%20open%20issues%2C%20and%20predictive%20learning%20as%20a%20possible%20framework%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Murat%22%2C%22lastName%22%3A%22Kirtay%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Olga%20A.%22%2C%22lastName%22%3A%22Wudarczyk%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Doris%22%2C%22lastName%22%3A%22Pischedda%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Anna%20K.%22%2C%22lastName%22%3A%22Kuhlen%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Rasha%20Abdel%22%2C%22lastName%22%3A%22Rahman%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22John-Dylan%22%2C%22lastName%22%3A%22Haynes%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Verena%20V.%22%2C%22lastName%22%3A%22Hafner%22%7D%5D%2C%22abstractNote%22%3A%22%22%2C%22proceedingsTitle%22%3A%222020%20Joint%20IEEE%2010th%20International%20Conference%20on%20Development%20and%20Learning%20and%20Epigenetic%20Robotics%20%28ICDL-EpiRob%29%22%2C%22conferenceName%22%3A%222020%20Joint%20IEEE%2010th%20International%20Conference%20on%20Development%20and%20Learning%20and%20Epigenetic%20Robotics%20%28ICDL-EpiRob%29%22%2C%22date%22%3A%222020-10-26%22%2C%22eventPlace%22%3A%22%22%2C%22DOI%22%3A%2210.1109%5C%2FICDL-EpiRob48136.2020.9278031%22%2C%22ISBN%22%3A%22978-1-7281-7306-1%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22https%3A%5C%2F%5C%2Fieeexplore.ieee.org%5C%2Fdocument%5C%2F9278031%5C%2F%22%2C%22ISSN%22%3A%22%22%2C%22language%22%3A%22%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-22T11%3A47%3A10Z%22%7D%7D%2C%7B%22key%22%3A%22HPETK8PA%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Kirtay%20et%20al.%22%2C%22parsedDate%22%3A%222021-08-23%22%2C%22numChildren%22%3A0%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BKirtay%2C%20M.%2C%20Chevalere%2C%20J.%2C%20Lazarides%2C%20R.%2C%20%26amp%3B%20Hafner%2C%20V.%20V.%20%282021%29.%20Learning%20in%20Social%20Interaction%3A%20Perspectives%20from%20Psychology%20and%20Robotics.%20%26lt%3Bi%26gt%3B2021%20IEEE%20International%20Conference%20on%20Development%20and%20Learning%20%28ICDL%29%26lt%3B%5C%2Fi%26gt%3B%2C%201%26%23x2013%3B8.%20%26lt%3Ba%20class%3D%26%23039%3Bzp-DOIURL%26%23039%3B%20href%3D%26%23039%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1109%5C%2FICDL49984.2021.9515648%26%23039%3B%26gt%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1109%5C%2FICDL49984.2021.9515648%26lt%3B%5C%2Fa%26gt%3B%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22conferencePaper%22%2C%22title%22%3A%22Learning%20in%20Social%20Interaction%3A%20Perspectives%20from%20Psychology%20and%20Robotics%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Murat%22%2C%22lastName%22%3A%22Kirtay%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Johann%22%2C%22lastName%22%3A%22Chevalere%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Rebecca%22%2C%22lastName%22%3A%22Lazarides%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Verena%20V.%22%2C%22lastName%22%3A%22Hafner%22%7D%5D%2C%22abstractNote%22%3A%22%22%2C%22proceedingsTitle%22%3A%222021%20IEEE%20International%20Conference%20on%20Development%20and%20Learning%20%28ICDL%29%22%2C%22conferenceName%22%3A%222021%20IEEE%20International%20Conference%20on%20Development%20and%20Learning%20%28ICDL%29%22%2C%22date%22%3A%222021-8-23%22%2C%22eventPlace%22%3A%22%22%2C%22DOI%22%3A%2210.1109%5C%2FICDL49984.2021.9515648%22%2C%22ISBN%22%3A%22978-1-7281-6242-3%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22https%3A%5C%2F%5C%2Fieeexplore.ieee.org%5C%2Fdocument%5C%2F9515648%5C%2F%22%2C%22ISSN%22%3A%22%22%2C%22language%22%3A%22%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-22T11%3A48%3A01Z%22%7D%7D%2C%7B%22key%22%3A%22S6WC4SGW%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Kirtay%20et%20al.%22%2C%22parsedDate%22%3A%222021-08-08%22%2C%22numChildren%22%3A0%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BKirtay%2C%20M.%2C%20Oztop%2C%20E.%2C%20Asada%2C%20M.%2C%20%26amp%3B%20Hafner%2C%20V.%20V.%20%282021%29.%20Trust%20me%21%20I%20am%20a%20robot%3A%20an%20affective%20computational%20account%20of%20scaffolding%20in%20robot-robot%20interaction.%20%26lt%3Bi%26gt%3B2021%2030th%20IEEE%20International%20Conference%20on%20Robot%20%26amp%3B%20Human%20Interactive%20Communication%20%28RO-MAN%29%26lt%3B%5C%2Fi%26gt%3B%2C%20189%26%23x2013%3B196.%20%26lt%3Ba%20class%3D%26%23039%3Bzp-DOIURL%26%23039%3B%20href%3D%26%23039%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1109%5C%2FRO-MAN50785.2021.9515494%26%23039%3B%26gt%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1109%5C%2FRO-MAN50785.2021.9515494%26lt%3B%5C%2Fa%26gt%3B%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22conferencePaper%22%2C%22title%22%3A%22Trust%20me%21%20I%20am%20a%20robot%3A%20an%20affective%20computational%20account%20of%20scaffolding%20in%20robot-robot%20interaction%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Murat%22%2C%22lastName%22%3A%22Kirtay%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Erhan%22%2C%22lastName%22%3A%22Oztop%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Minoru%22%2C%22lastName%22%3A%22Asada%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Verena%20V.%22%2C%22lastName%22%3A%22Hafner%22%7D%5D%2C%22abstractNote%22%3A%22%22%2C%22proceedingsTitle%22%3A%222021%2030th%20IEEE%20International%20Conference%20on%20Robot%20%26%20Human%20Interactive%20Communication%20%28RO-MAN%29%22%2C%22conferenceName%22%3A%222021%2030th%20IEEE%20International%20Conference%20on%20Robot%20%26%20Human%20Interactive%20Communication%20%28RO-MAN%29%22%2C%22date%22%3A%222021-8-8%22%2C%22eventPlace%22%3A%22%22%2C%22DOI%22%3A%2210.1109%5C%2FRO-MAN50785.2021.9515494%22%2C%22ISBN%22%3A%22978-1-6654-0492-1%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22https%3A%5C%2F%5C%2Fieeexplore.ieee.org%5C%2Fdocument%5C%2F9515494%5C%2F%22%2C%22ISSN%22%3A%22%22%2C%22language%22%3A%22%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-22T11%3A48%3A04Z%22%7D%7D%2C%7B%22key%22%3A%22IWVFW7FX%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Kirtay%20et%20al.%22%2C%22parsedDate%22%3A%222021-08-23%22%2C%22numChildren%22%3A0%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BKirtay%2C%20M.%2C%20Oztop%2C%20E.%2C%20Asada%2C%20M.%2C%20%26amp%3B%20Hafner%2C%20V.%20V.%20%282021%29.%20Modeling%20robot%20trust%20based%20on%20emergent%20emotion%20in%20an%20interactive%20task.%20%26lt%3Bi%26gt%3B2021%20IEEE%20International%20Conference%20on%20Development%20and%20Learning%20%28ICDL%29%26lt%3B%5C%2Fi%26gt%3B%2C%201%26%23x2013%3B8.%20%26lt%3Ba%20class%3D%26%23039%3Bzp-DOIURL%26%23039%3B%20href%3D%26%23039%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1109%5C%2FICDL49984.2021.9515645%26%23039%3B%26gt%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1109%5C%2FICDL49984.2021.9515645%26lt%3B%5C%2Fa%26gt%3B%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22conferencePaper%22%2C%22title%22%3A%22Modeling%20robot%20trust%20based%20on%20emergent%20emotion%20in%20an%20interactive%20task%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Murat%22%2C%22lastName%22%3A%22Kirtay%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Erhan%22%2C%22lastName%22%3A%22Oztop%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Minoru%22%2C%22lastName%22%3A%22Asada%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Verena%20V.%22%2C%22lastName%22%3A%22Hafner%22%7D%5D%2C%22abstractNote%22%3A%22%22%2C%22proceedingsTitle%22%3A%222021%20IEEE%20International%20Conference%20on%20Development%20and%20Learning%20%28ICDL%29%22%2C%22conferenceName%22%3A%222021%20IEEE%20International%20Conference%20on%20Development%20and%20Learning%20%28ICDL%29%22%2C%22date%22%3A%222021-8-23%22%2C%22eventPlace%22%3A%22%22%2C%22DOI%22%3A%2210.1109%5C%2FICDL49984.2021.9515645%22%2C%22ISBN%22%3A%22978-1-7281-6242-3%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22https%3A%5C%2F%5C%2Fieeexplore.ieee.org%5C%2Fdocument%5C%2F9515645%5C%2F%22%2C%22ISSN%22%3A%22%22%2C%22language%22%3A%22%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-22T11%3A48%3A07Z%22%7D%7D%2C%7B%22key%22%3A%22A9UHJQHN%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Eiserbeck%20et%20al.%22%2C%22parsedDate%22%3A%222024%22%2C%22numChildren%22%3A0%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BEiserbeck%2C%20A.%2C%20Wudarczyk%2C%20O.%2C%20Kuhlen%2C%20A.%2C%20Hafner%2C%20V.%20V.%2C%20Haynes%2C%20J.-D.%2C%20%26amp%3B%20Abdel%20Rahman%2C%20R.%20%282024%29.%20%26lt%3Bi%26gt%3BCommunicative%20context%20enhances%20emotional%20word%20processing%20with%20human%20speakers%20but%20not%20with%20robots%26lt%3B%5C%2Fi%26gt%3B%20%5BPoster%5D.%20Association%20for%20the%20Scientific%20Study%20of%20Consciousness%20%28ASSC27%29.%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22presentation%22%2C%22title%22%3A%22Communicative%20context%20enhances%20emotional%20word%20processing%20with%20human%20speakers%20but%20not%20with%20robots%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22Anna%22%2C%22lastName%22%3A%22Eiserbeck%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22Olga%22%2C%22lastName%22%3A%22Wudarczyk%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22Anna%22%2C%22lastName%22%3A%22Kuhlen%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22Verena%20Vanessa%22%2C%22lastName%22%3A%22Hafner%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22John-Dylan%22%2C%22lastName%22%3A%22Haynes%22%7D%2C%7B%22creatorType%22%3A%22presenter%22%2C%22firstName%22%3A%22Rasha%22%2C%22lastName%22%3A%22Abdel%20Rahman%22%7D%5D%2C%22abstractNote%22%3A%22%22%2C%22date%22%3A%222024%22%2C%22sessionTitle%22%3A%22%22%2C%22DOI%22%3A%22%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22%22%2C%22language%22%3A%22%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-16T15%3A36%3A43Z%22%7D%7D%2C%7B%22key%22%3A%22PRFI5GE2%22%2C%22library%22%3A%7B%22id%22%3A6984777%7D%2C%22meta%22%3A%7B%22creatorSummary%22%3A%22Cheval%5Cu00e8re%20et%20al.%22%2C%22parsedDate%22%3A%222023%22%2C%22numChildren%22%3A1%7D%2C%22bib%22%3A%22%26lt%3Bdiv%20class%3D%26quot%3Bcsl-bib-body%26quot%3B%20style%3D%26quot%3Bline-height%3A%202%3B%20padding-left%3A%201em%3B%20text-indent%3A-1em%3B%26quot%3B%26gt%3B%5Cn%20%20%26lt%3Bdiv%20class%3D%26quot%3Bcsl-entry%26quot%3B%26gt%3BCheval%26%23xE8%3Bre%2C%20J.%2C%20Kirtay%2C%20M.%2C%20Hafner%2C%20V.%20V.%2C%20%26amp%3B%20Lazarides%2C%20R.%20%282023%29.%20Who%20to%20Observe%20and%20Imitate%20in%20Humans%20and%20Robots%3A%20The%20Importance%20of%20Motivational%20Factors.%20%26lt%3Bi%26gt%3BInternational%20Journal%20of%20Social%20Robotics%26lt%3B%5C%2Fi%26gt%3B%2C%20%26lt%3Bi%26gt%3B15%26lt%3B%5C%2Fi%26gt%3B%288%29%2C%201265%26%23x2013%3B1275.%20%26lt%3Ba%20class%3D%26%23039%3Bzp-DOIURL%26%23039%3B%20href%3D%26%23039%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1007%5C%2Fs12369-022-00923-9%26%23039%3B%26gt%3Bhttps%3A%5C%2F%5C%2Fdoi.org%5C%2F10.1007%5C%2Fs12369-022-00923-9%26lt%3B%5C%2Fa%26gt%3B%26lt%3B%5C%2Fdiv%26gt%3B%5Cn%26lt%3B%5C%2Fdiv%26gt%3B%22%2C%22data%22%3A%7B%22itemType%22%3A%22journalArticle%22%2C%22title%22%3A%22Who%20to%20Observe%20and%20Imitate%20in%20Humans%20and%20Robots%3A%20The%20Importance%20of%20Motivational%20Factors%22%2C%22creators%22%3A%5B%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Johann%22%2C%22lastName%22%3A%22Cheval%5Cu00e8re%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Murat%22%2C%22lastName%22%3A%22Kirtay%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Verena%20V.%22%2C%22lastName%22%3A%22Hafner%22%7D%2C%7B%22creatorType%22%3A%22author%22%2C%22firstName%22%3A%22Rebecca%22%2C%22lastName%22%3A%22Lazarides%22%7D%5D%2C%22abstractNote%22%3A%22Abstract%5Cn%20%20%20%20%20%20%20%20%20%20%20%20%5Cn%20%20%20%20%20%20%20%20%20%20%20%20%20%20Imitation%20is%20a%20vital%20skill%20that%20humans%20leverage%20in%20various%20situations.%20Humans%20achieve%20imitation%20by%20observing%20others%20with%20apparent%20ease.%20Yet%2C%20in%20reality%2C%20it%20is%20computationally%20expensive%20to%20model%20on%20artificial%20agents%20%28e.g.%2C%20social%20robots%29%20to%20acquire%20new%20skills%20by%20imitating%20an%20expert%20agent.%20Although%20learning%20through%20imitation%20has%20been%20extensively%20addressed%20in%20the%20robotic%20literature%2C%20most%20studies%20focus%20on%20answering%20the%20following%20questions%3A%5Cn%20%20%20%20%20%20%20%20%20%20%20%20%20%20what%5Cn%20%20%20%20%20%20%20%20%20%20%20%20%20%20to%20imitate%20and%5Cn%20%20%20%20%20%20%20%20%20%20%20%20%20%20how%5Cn%20%20%20%20%20%20%20%20%20%20%20%20%20%20to%20imitate%5Cn%20%20%20%20%20%20%20%20%20%20%20%20%20%20.%5Cn%20%20%20%20%20%20%20%20%20%20%20%20%20%20In%20this%20conceptual%20paper%2C%20we%20focus%20on%20one%20of%20the%20overlooked%20questions%20of%20imitation%20through%20observation%3A%5Cn%20%20%20%20%20%20%20%20%20%20%20%20%20%20who%5Cn%20%20%20%20%20%20%20%20%20%20%20%20%20%20to%20imitate.%20We%20present%20possible%20answers%20to%20the%5Cn%20%20%20%20%20%20%20%20%20%20%20%20%20%20who-%5Cn%20%20%20%20%20%20%20%20%20%20%20%20%20%20to-imitate%20question%20by%20exploring%20motivational%20factors%20documented%20in%20psychological%20research%20and%20their%20possible%20implementation%20in%20robotics.%20To%20this%20end%2C%20we%20focus%20on%20two%20critical%20instances%20of%20the%5Cn%20%20%20%20%20%20%20%20%20%20%20%20%20%20who%5Cn%20%20%20%20%20%20%20%20%20%20%20%20%20%20-to-imitate%20question%20that%20guide%20agents%20to%20prioritize%20one%20demonstrator%20over%20another%3A%20outcome%20expectancies%2C%20viewed%20as%20the%20anticipated%20learning%20gains%2C%20and%20efficacy%20expectations%2C%20viewed%20as%20the%20anticipated%20costs%20of%20performing%20actions%2C%20respectively.%22%2C%22date%22%3A%2208%5C%2F2023%22%2C%22section%22%3A%22%22%2C%22partNumber%22%3A%22%22%2C%22partTitle%22%3A%22%22%2C%22DOI%22%3A%2210.1007%5C%2Fs12369-022-00923-9%22%2C%22citationKey%22%3A%22%22%2C%22url%22%3A%22https%3A%5C%2F%5C%2Flink.springer.com%5C%2F10.1007%5C%2Fs12369-022-00923-9%22%2C%22PMID%22%3A%22%22%2C%22PMCID%22%3A%22%22%2C%22ISSN%22%3A%221875-4791%2C%201875-4805%22%2C%22language%22%3A%22en%22%2C%22collections%22%3A%5B%5D%2C%22dateModified%22%3A%222026-06-29T10%3A40%3A30Z%22%7D%7D%5D%7D
Yun, H. S., Hübert, H., Taliaronak, V., Mayet, R., Kirtay, M., Hafner, V. V., & Pinkwart, N. (2022). AI-Based Open-Source Gesture Retargeting to a Humanoid Teaching Robot. In M. M. Rodrigo, N. Matsuda, A. I. Cristea, & V. Dimitrova (Eds.),
Artificial Intelligence in Education. Posters and Late Breaking Results, Workshops and Tutorials, Industry and Innovation Tracks, Practitioners’ and Doctoral Consortium (pp. 276–279). Springer International Publishing.
https://doi.org/10.1007/978-3-031-11647-6_51
Yun, H. S., Taliaronak, V., Kirtay, M., Chevelère, J., Hübert, H., Hafner, V. V., Pinkwart, N., & Lazarides, R. (2022). Challenges in Designing Teacher Robots with Motivation Based Gestures [Poster]. Workshop on Robot Curiosity in Human-Robot Interaction (RCHRI).
Wudarczyk, O. A., Kirtay, M., Kuhlen, A. K., Abdel Rahman, R., Haynes, J.-D., Hafner, V. V., & Pischedda, D. (2021). Bringing Together Robotics, Neuroscience, and Psychology: Lessons Learned From an Interdisciplinary Project.
Frontiers in Human Neuroscience,
15, 630789.
https://doi.org/10.3389/fnhum.2021.630789
Wudarczyk, O. A., Kirtay, M., Pischedda, D., Hafner, V. V., Haynes, J.-D., Kuhlen, A. K., & Abdel Rahman, R. (2021). Robots facilitate human language production.
Scientific Reports,
11(1), 16737.
https://doi.org/10.1038/s41598-021-95645-9
Spatola, N., & Wudarczyk, O. A. (2021). Ascribing emotions to robots: Explicit and implicit attribution of emotions and perceived robot anthropomorphism.
Computers in Human Behavior,
124, 106934.
https://doi.org/10.1016/j.chb.2021.106934
Spatola, N., & Wudarczyk, O. A. (2021). Implicit Attitudes Towards Robots Predict Explicit Attitudes, Semantic Distance Between Robots and Humans, Anthropomorphism, and Prosocial Behavior: From Attitudes to Human–Robot Interaction.
International Journal of Social Robotics,
13(5), 1149–1159.
https://doi.org/10.1007/s12369-020-00701-5
Pischedda, D., Kaufmann, V., Wudarczyk, O. A., Rahman, R. A., Hafner, V. V., Kuhlen, A. K., & Haynes, J.-D. (2023). Human or AI? The brain knows it! A brain-based Turing Test to discriminate between human and artificial agents.
2023 32nd IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 951–958.
https://doi.org/10.1109/RO-MAN57019.2023.10309541
Pischedda, D., Erener, Ş., Kuhlen, A., & Haynes, J.-D. (2023, September). How Do People Discriminate Conversations Generated By Humans And Artificial Intelligence? The Role Of Individual Variability On People’s Judgment [Poster]. 23rd Conference of the European Society for Cognitive Psychology (ESCOP).
Pischedda, D., Lange, A., Kirtay, M., Wudarczyk, O., Abdel Rahman, R., Hafner, V. V., Kuhlen, A. K., & Haynes, J.-D. (2021). Who is my interlocutor? Partner-specific neural representations during communicative interactions with human or artificial task partners. [Poster]. 5th Virtual Social Interactions (VSI) Conference.
Pischedda, D., Lange, A., Kirtay, M., Wudarczyk, O., Abdel Rahman, R., Hafner, V. V., Kuhlen, A. K., & Haynes, J.-D. (2021). Am I speaking to a human, a robot, or a computer? Neural representations of task partners in communicative interactions with humans or artificial agents [Poster]. Annual Meeting of the Society for Neuroscience (SfN).
Pischedda, D. (2025). How do people discriminate conversations generated by humans and artificial intelligence? The role of individual variability on people’s judgment [Poster]. Giornata sul pensiero.
Kirtay, M., Oztop, E., Kuhlen, A. K., Asada, M., & Hafner, V. V. (2022). Trustworthiness assessment in multimodal human-robot interaction based on cognitive load.
2022 31st IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 469–476.
https://doi.org/10.1109/RO-MAN53752.2022.9900730
Kirtay, M., Oztop, E., Kuhlen, A. K., Asada, M., & Hafner, V. V. (2022). Forming robot trust in heterogeneous agents during a multimodal interactive game.
2022 IEEE International Conference on Development and Learning (ICDL), 307–313.
https://doi.org/10.1109/ICDL53763.2022.9962212
Kirtay, M., Hafner, V. V., Asada, M., & Oztop, E. (2023). Trust in Robot–Robot Scaffolding.
IEEE Transactions on Cognitive and Developmental Systems,
15(4), 1841–1852.
https://doi.org/10.1109/TCDS.2023.3235974
Kirtay, M., Wudarczyk, O. A., Pischedda, D., Kuhlen, A. K., Rahman, R. A., Haynes, J.-D., & Hafner, V. V. (2020). Modeling robot co-representation: state-of-the-art, open issues, and predictive learning as a possible framework.
2020 Joint IEEE 10th International Conference on Development and Learning and Epigenetic Robotics (ICDL-EpiRob), 1–8.
https://doi.org/10.1109/ICDL-EpiRob48136.2020.9278031
Kirtay, M., Chevalere, J., Lazarides, R., & Hafner, V. V. (2021). Learning in Social Interaction: Perspectives from Psychology and Robotics.
2021 IEEE International Conference on Development and Learning (ICDL), 1–8.
https://doi.org/10.1109/ICDL49984.2021.9515648
Kirtay, M., Oztop, E., Asada, M., & Hafner, V. V. (2021). Trust me! I am a robot: an affective computational account of scaffolding in robot-robot interaction.
2021 30th IEEE International Conference on Robot & Human Interactive Communication (RO-MAN), 189–196.
https://doi.org/10.1109/RO-MAN50785.2021.9515494
Kirtay, M., Oztop, E., Asada, M., & Hafner, V. V. (2021). Modeling robot trust based on emergent emotion in an interactive task.
2021 IEEE International Conference on Development and Learning (ICDL), 1–8.
https://doi.org/10.1109/ICDL49984.2021.9515645
Eiserbeck, A., Wudarczyk, O., Kuhlen, A., Hafner, V. V., Haynes, J.-D., & Abdel Rahman, R. (2024). Communicative context enhances emotional word processing with human speakers but not with robots [Poster]. Association for the Scientific Study of Consciousness (ASSC27).
Chevalère, J., Kirtay, M., Hafner, V. V., & Lazarides, R. (2023). Who to Observe and Imitate in Humans and Robots: The Importance of Motivational Factors.
International Journal of Social Robotics,
15(8), 1265–1275.
https://doi.org/10.1007/s12369-022-00923-9



