Alex Kacelnik on birds and what robots can learn from them
Try to pick up an object from a table. Depending on how tall or flat the object is, you are going to have to make decisions in order to move the right muscles and exert the right amount of grip. Although these mechanisms are commonplace to us, they require complex modeling if we want to reproduce them in robots. Before landing at SCIoI, Alex Kacelnik, who is Professor of Behavioral Ecology at the University of Oxford, has spent much of his career modelling decision-making and problem-solving behaviors in birds. At SCIoI, he concentrates on the problem-solving abilities of cockatoos with the aim of transferring these mechanisms to robots. We had a talk with him, and this is what he told us.

For many years, you have based your career on the topic of decision-making in birds. What does that have to do with robots?
“Just to give you a bit of history: I started out my research at the University of Oxford by analysing quantitative methods of decision-making in birds. Initially I was focusing on decision processes where the goal was clear: animals maximising the rate of food intake. It’s a simple decision process, but its study is complex enough. At some point, however, about twenty years ago, I became interested in the use of tools in New Caledonian crows, who are very special animals because they are the most intense tool users in the animal world. These crows use tools not only to get food but also to explore potentially dangerous environments. And sometimes they use tools they made themselves. Tool use is not especially demanding in terms of intelligence compared to other activities, but it is especially revealing, because it shows us what the animal knows of the world, what kind of relationships the animal assumes. We found that crows use tools for various activities: to find food, but also to assess danger. When we saw this behaviour we felt the need to find a richer way of modelling to study this behaviour, and these models can be applied to artificial intelligence.”
What led you to SCIoI’s robotics lab?
“I’ve always considered my research to be on the margins with experimental psychology and even behavioral economy to a certain extent. Because of this simultaneous interest in the biological functions of behaviour and the mechanisms of behaviour it came very natural to me to start working with people who are doing models of intelligence, and this is what led me here. Ten years ago I started collaborating with Alice von Auersperg (who is also an External PI at SCIoI). She developed work on the Goffin cockatoos, and we became associated because we were interested in similar topics. Although those were not crows, these birds were solving complex mechanical problems. Then, seven or eight years ago I organised a meeting inn Oxford on natural and artificial intelligence, and one of the invitees was Oliver Brock. That’s where I first met him. We tried to look at the interaction between animal behaviour and some branches of developmental robotics. The relationship developed from there.”
Could you describe your work at SCIoI?
“At SCIoI, we are trying to find out whether cockatoos can infer physical properties of the world, other than specific solutions to specific problems, and at what level of conceptualization they can learn sophisticated forms of mechanical solutions. This helps our research in two directions, because while biological intelligence inspires the creation of intelligent artificial systems, these systems also give biologists new insights into natural intelligence. There’s a lot of potential information in bird behaviour, and we want to translate this into the world of designing artificial intelligence.”
How does the experiment work?
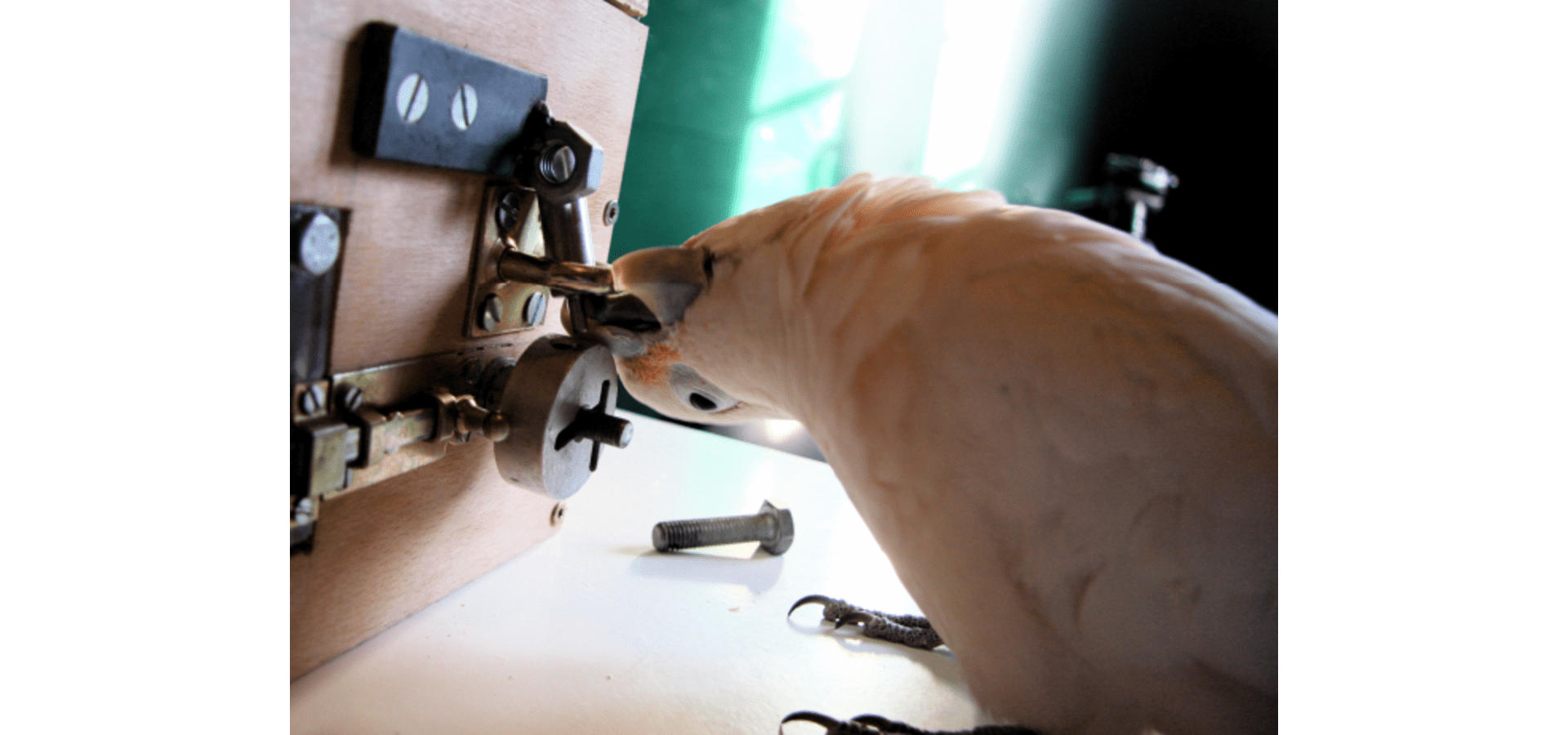
“It involves creating a physical apparatus made out of a series of mechanical locks where reaching a solution requires observing the present configuration and the use of previously learned notions. In human problem solving we do it unconsciously, and it is everyday business, but actually it’s a complex game of generalizing and applying specifics. We want to build robots who are able to do that.”
Want to know more? On 7 November at 6pm, Alex Kacelnik will be at the Berlin Science Week together with Marc Toussaint, and they will discuss key problems in studying intelligence in both animals and AI systems.



